Lakes are thawing in New Hampshire and I’m starting to put together a new ArduBoat for the season with some spare quad parts but I’m a bit rusty and it looks like a lot of things have changed and need a little guidance to get me started.
I have a Kakute F7 (not AIO) flight controller and am hoping to load ArduRover 3.5 for use in an ArduBoat. The latest release shows support for Kakute F4 but not F7, does anyone know if F7 is also supported?
Also…can anyone link me to a how-to for loading ArduRover firmware onto a non-pixhawk FC?
Instructions for loading the firmware on “ChibiOS-only” boards is here. “ChibiOS-only” is not a great name for these new boards but we haven’t thought of another name for all the non-Pixhawk/non-Linux boards that we support.
I suspect the KakuteF7 (not AIO) will work but I’m not actually sure. We should update the wiki once we find out. There is a directory called “KakuteF7” on our firmware server.
Thanks for the help. Might help to add this link to the Hardware options. It’s a bit confusing on the page since it is listed as hardware options for ArduRover then has a note that says “supported with copter 3.6.0 and higher” http://ardupilot.org/rover/docs/common-holybro-kakutef7aio.html
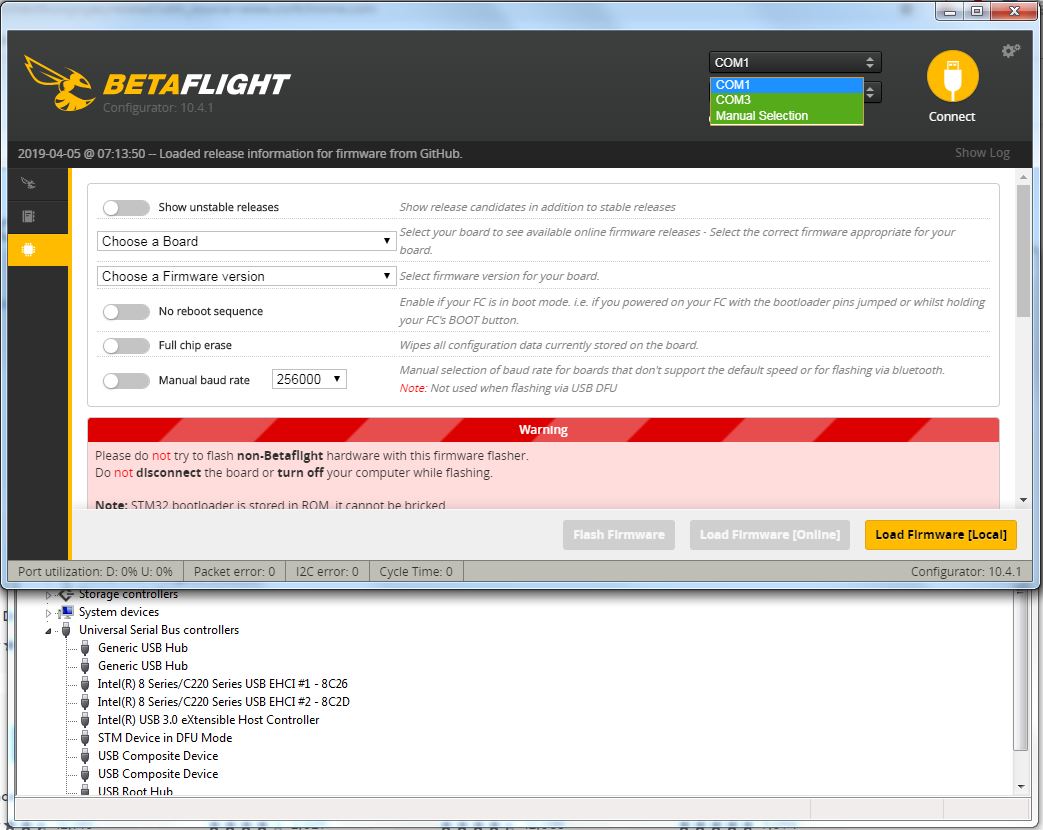
Anyways, still having issues. I have the driver installed but cannot find DFU under the BetaFlight dropdown. I tried starting BF while FC is in DFU mode, rebooting computer, plugging in FC wile BF is open. Will try on my Windows 10 computer later at work.
I’m using windows 7, BF config 10.4.1, and device shows up on device manager as STM device in DF mode.
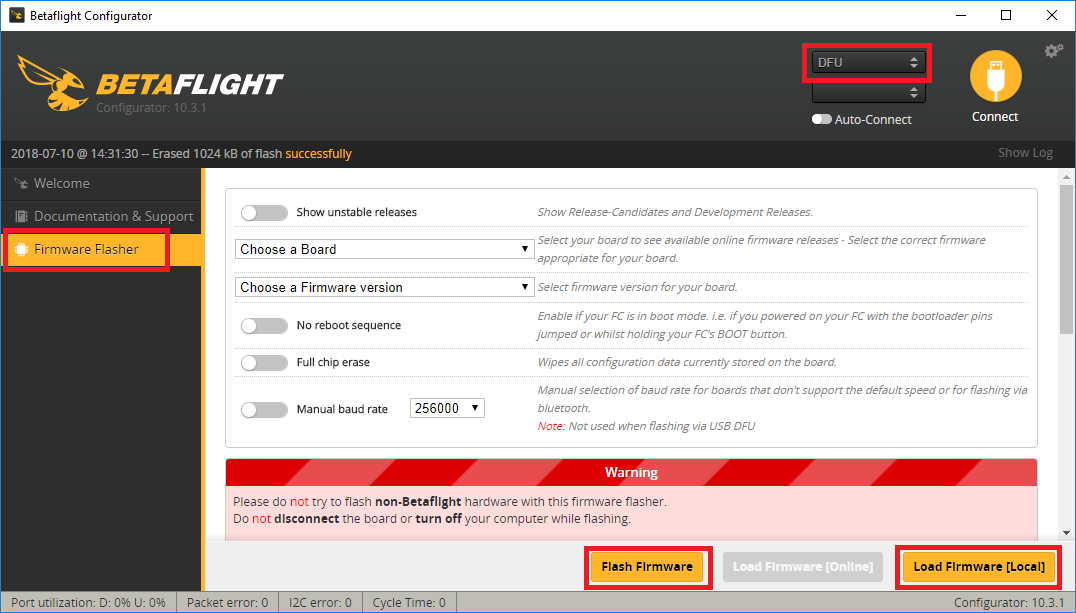
The screenshot of BF configurator on the ardupilot chibios setup page shows a DFU option on the drop down. The FC was plugged in while the button was depressed and the boards LED was solid indicating it’s in DFU mode.
I got everything setup but was hoping to use a SiK radio on the FC. It does not look like the Kakute has CTS/RTS pins so is there anyway to get a wireless mavlink connection on these flight controllers?
Alright, making a little progress here. I have the motor/rudder/FPVcam/OSD/GPS working but have a few other things I need help with.
I am getting a batt voltage of 4.47 volts and my battery is at 3.72/cell (11.2 total). I set the params to:
BATT_MONITOR 4
BATT_VOLT_PIN 13
BATT_CURR_PIN 12
BATT_VOLT_MULT 10.1
BATT_AMP_PERVLT 17.0
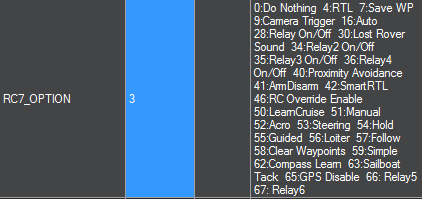
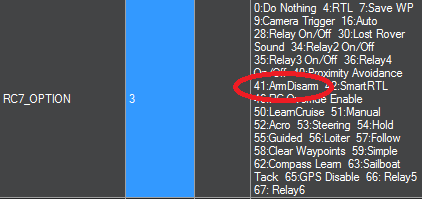
Also, I like using channel 7 as arm/disarm button. I see MP now has multiple drop down for other channels as well but they are not populated with options to select an action. I set RC7 to 3 in the params but it did not map 7 for arm/disarm. I have arming_req to 1, arming_check 0.