The problem is vibration, ECF error, GPS failure, dispersion error, but according to the logs, the vibrations are small.
I just can’t handle this problem. What I just didn’t do …
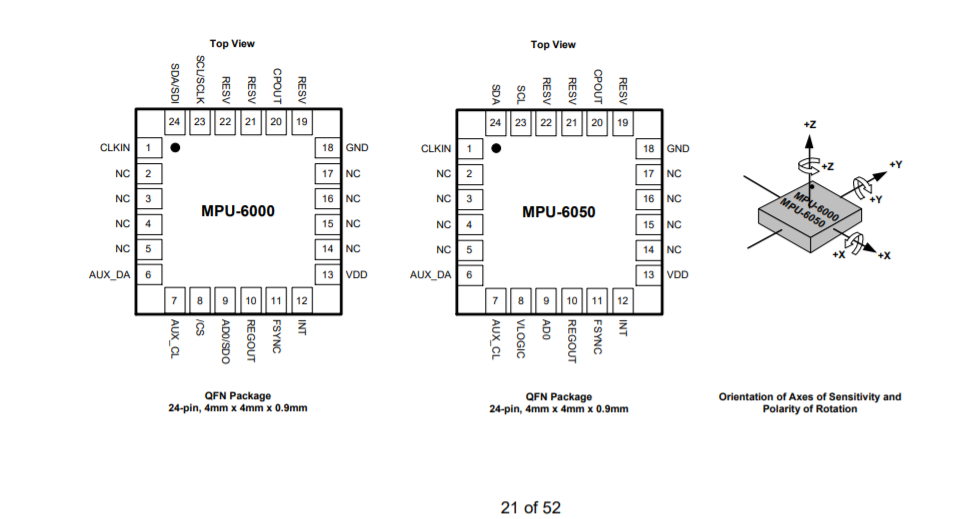
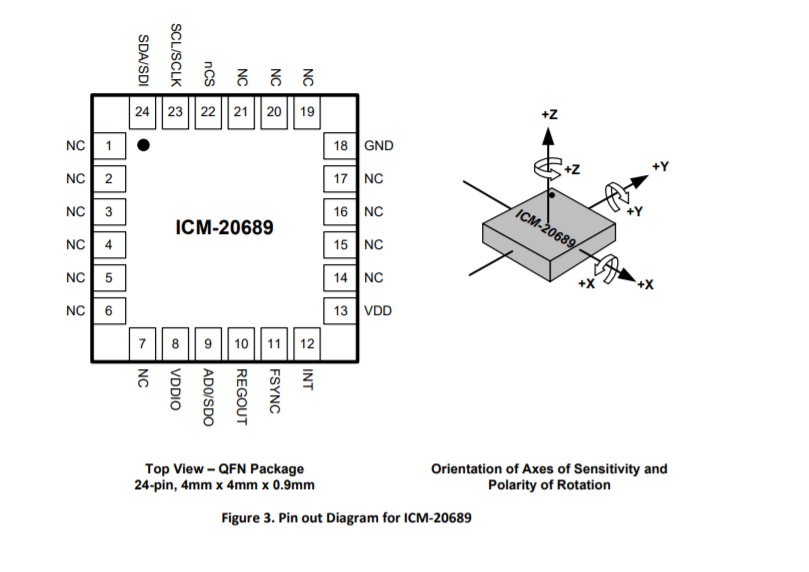
I decided to solder the gyroscope, remove the ICM 20689 and solder the mpu6000. but it didn’t work, tell me why ??? LOG
I think all the pins we use are the same, but I don’t know for sure.
Maybe it’s an issue w/ the HWDEF not loading the drivers for the 6000? I’m not sure, though, because both the mpu6000 and icm20689 are mentioned in the kakute hwdef.
Maybe someone w/ more experience w/ the code will have more information.
Just an FYI. From this site http://blog.cdiweb.com/2017/07/21/tdk-invensense-nrnd-replacement-parts/ it says " If you are using the MPU-6000 or the MPU-6050 motion sensors, the move to the newer sensor is easy, as the replacement device, the ICM-20689 is pin-to-pin compatible as long as the user is not using the Auxiliary I2C bus. There is no Auxiliary I2C bus on the ICM-20689.
EUREKA!!! WORKS!!!
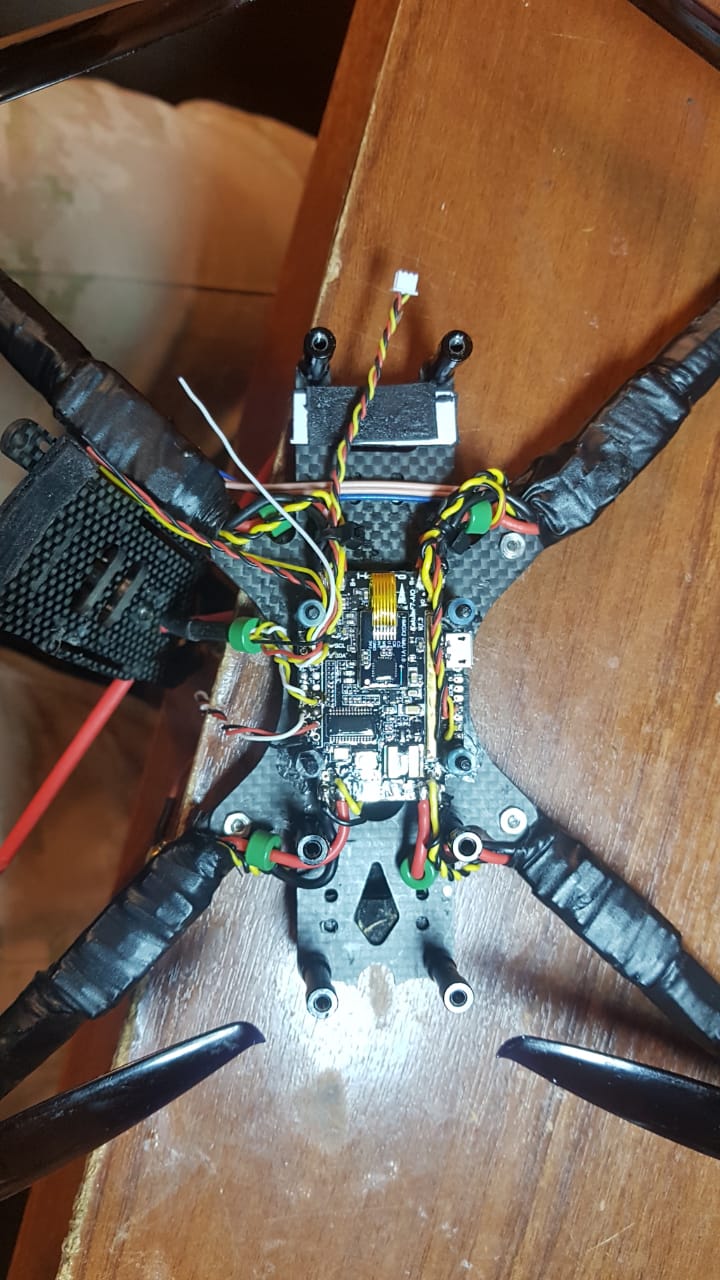
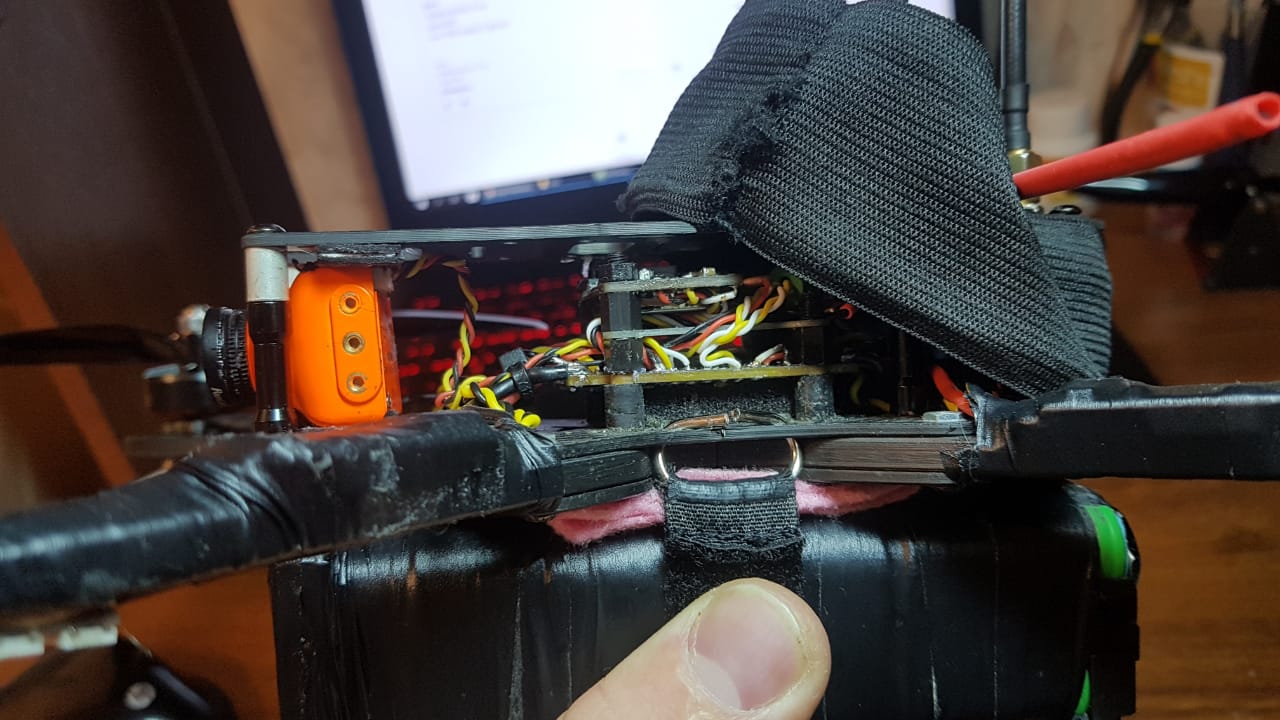
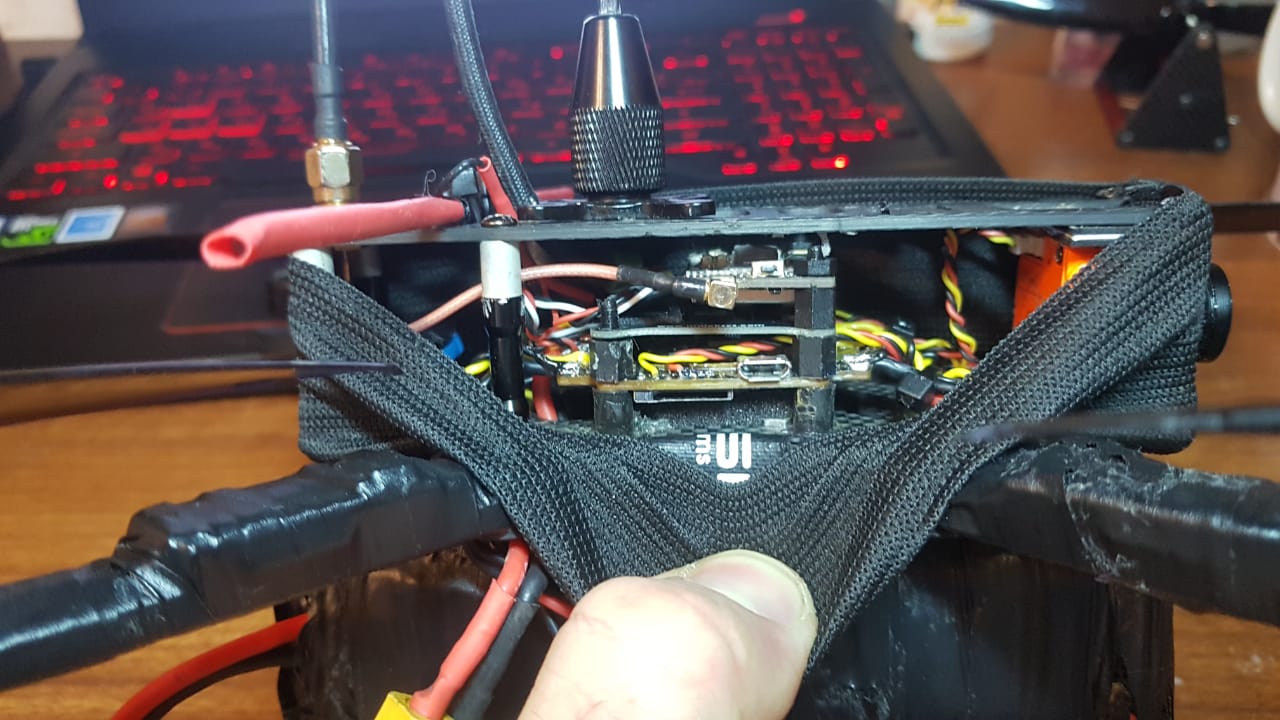
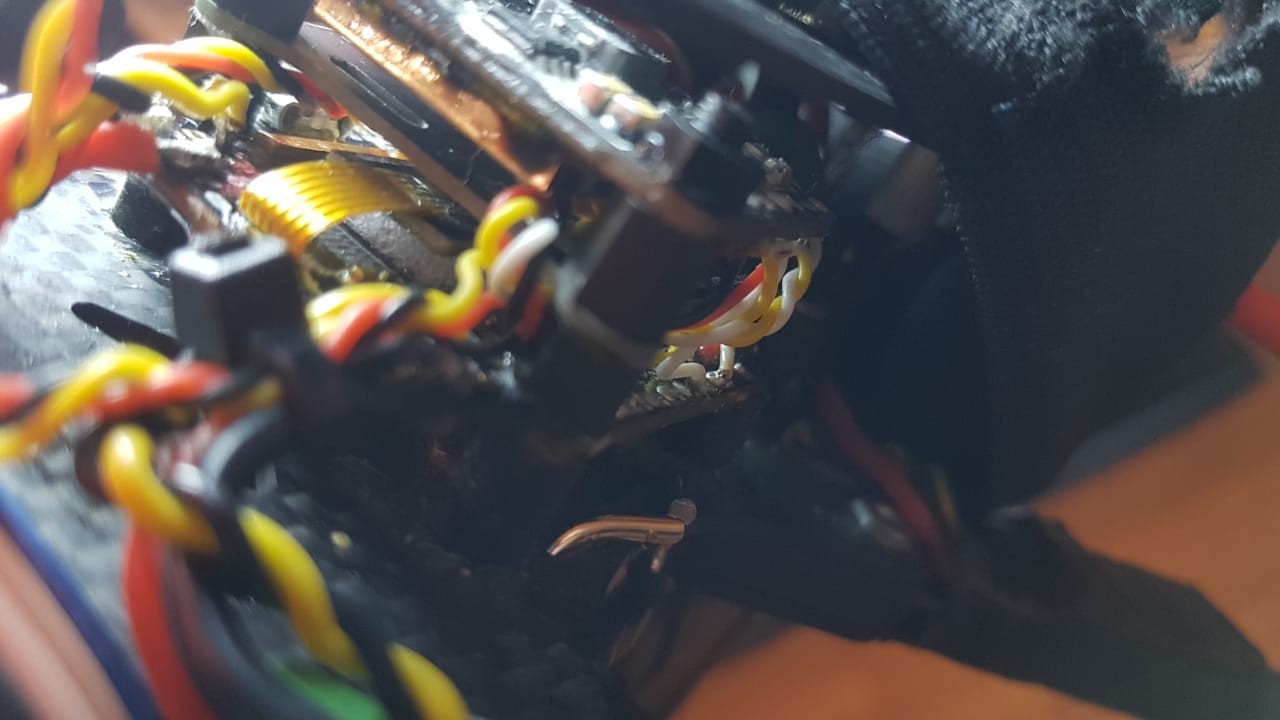
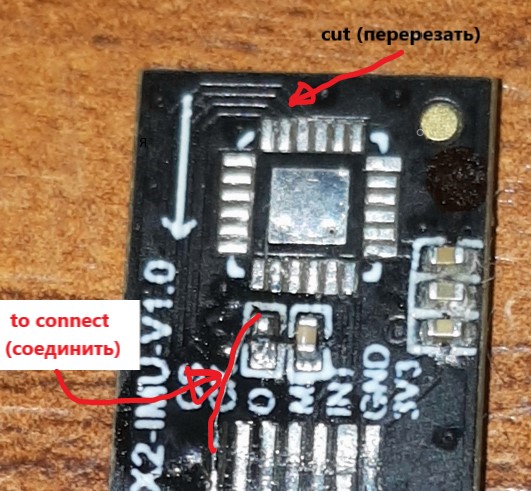
In general, the photo shows where what to cut and where to connect, checked on the firmware stable and beta.This is an instruction on how to remake version 1.3 to 1.5. replace the gyroscope with mpu6000