Did some testing with the latest 3.4 and made no other changes.
FANTASTIC RESULT!!
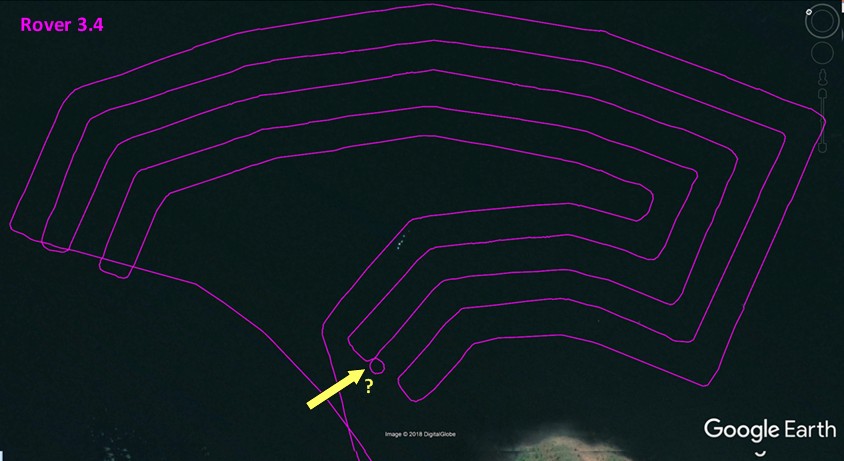
Both trails together -

Just 3.4 - As you can see a VAST improvement except for that one little hiccup.
Just 3.2 - This is too unreliable and causes massive waste of time when mapping.

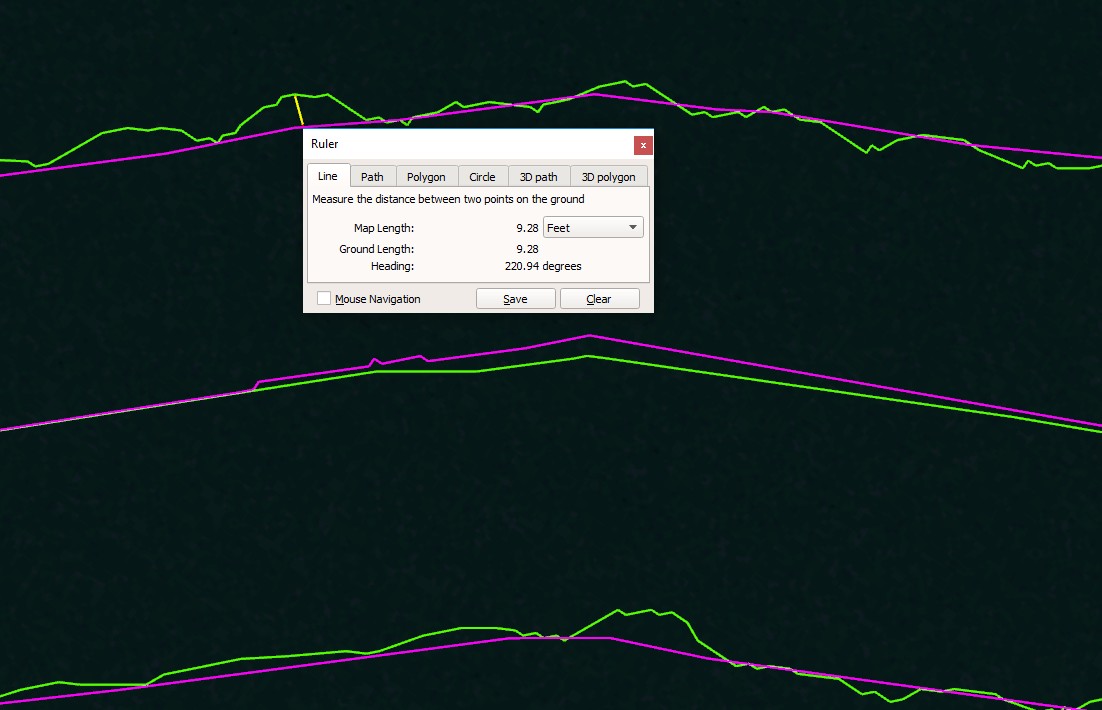
Zoomed in you can see how far out it was -