im a newbie and dont have much experience in this but
i recently built a quadcopter and it is having problems in loiter and althold mode.
i can fly the copter in stabalize mode but when i switch to alt hold or loiter there are some jitters and the copter can not stay level. i have tried to tune it with auto tune and it says copter failed to level please tune manually.i tried to change pids but oscillation started to occur so i set them back to default. i tried to review logs but i have no idea what to look for. i can see des roll vs roll are very different. same with des pitch vs pitch.also for some reason i cant upload the bigger log files hence i have uploaded what i can
im using 10 inch props with a2212 motors(orange color,china) and 30amps esc. (yellow color, china)
im using copter 4.4.2
if someone can help regarding this i would be grateful.
thanks in advance
thank you so much amilcarlucas for the warm welcome .im willing to learn i have attached google link for the files.
a little more details.
1)the kv rating is 1000
2) i have made a fully tuned quad before in early 2022. i didnt have that many issues till it was tuned. this time i decided to built a hexa but the same problem arose. after many failed attempts i decided to go back to the quad and this problem started to happen on the quad too.i have both logs in the folder. maybe that can be useful.
hi dave.i dont think any of the previous ones is without auto tune.
i did however find that one of the motor’s housing is slightly bent and touching slightly with the body.i have changed that now and added the 2 more flights. the first flight i did autotune again and is labelled “new failed autotune”.
I did another flight after reading your message.that one has no auto tune. the flight modes used are stabalize alt hold and loiter. this one is labelled as without autotune
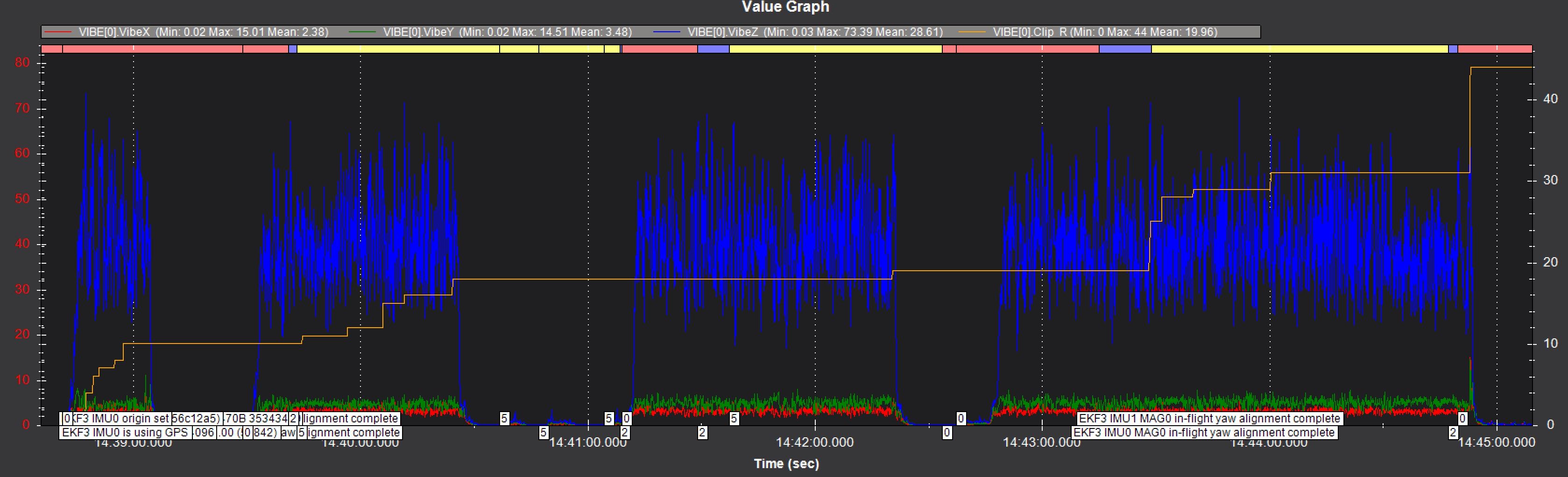
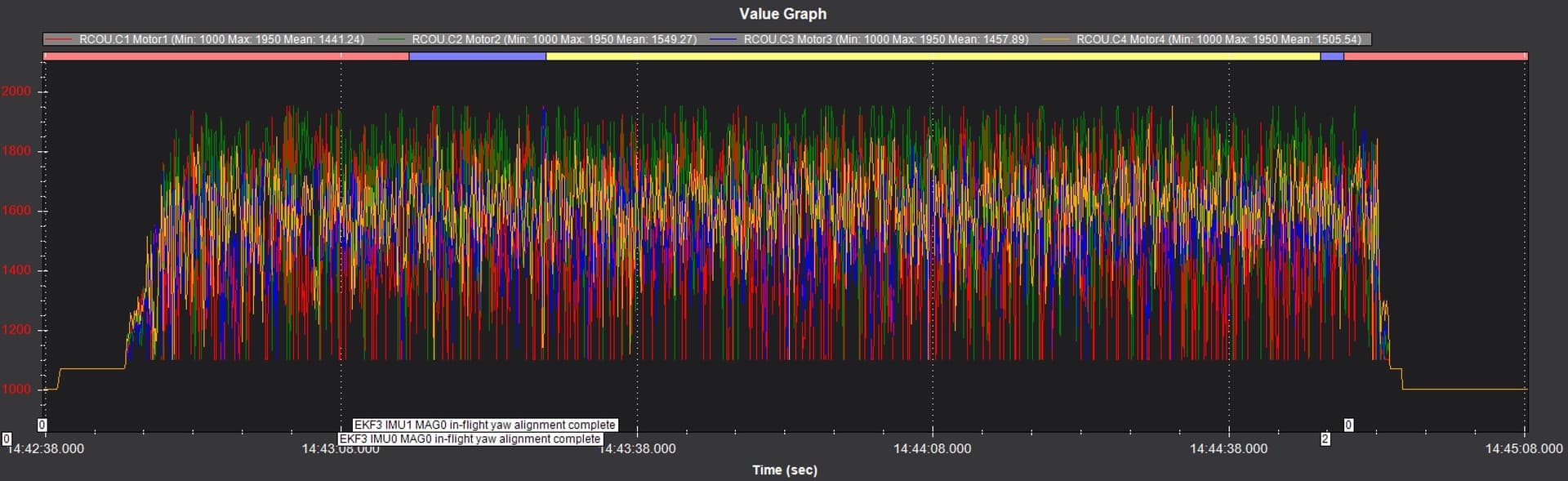
The 1st thing you need to address is the high level of vibration. The Z-levels are way too high. Are the props balanced? What frame is it? How is the FC mounted? There are other problems (output oscillation) but you need to lower the vibe levels in any case. And change these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
PSC_ACCZ_I,0.7
PSC_ACCZ_P,0.35
i will change these parameters and let you know. i have used a pen to see if the props r balanced. from what i understand they r balanced ( dont know how accurate that would be ). as for the frame it is a f450 frame (china). the pixhawk is mounted on a shock absorber platform.
when u say output oscillation, do u mean there is something wrong with my controller ?
i will read through the link u have sent me and get back to u.thanks
@dkemxr so i changed the settings u asked for. i also read the page u mentioned. did the esc calibration again. i found the deadzone to be at 5% and made the following changes to MOT_SPIN_ARM from 0.1 to 0.07 and mot_spin_min from 0.15 to 0.1. i have added another file named “dave setting” to the folder. this flight is without auto tune and in the 3 modes mentioned above.
i wanted to add, this flight was much more difficult in stabalize. the motors didnt sound right . im not sure but it sounded like they were turning on/off or werent getting enough power. one more thing to mention is that the ascend and descend of the aircraft was very laggy. when i wanted to land the drone in ALTHOLD mode it was coming down in steps and looked like lag to me.
I don’t see any battery logging, you need at least battery voltage.
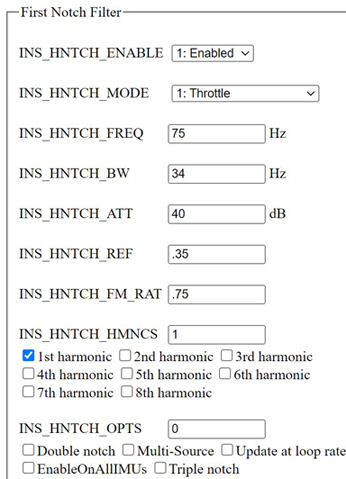
You need to reduce the vibration levels before tuning can advance. The notch filter won’t do much good with those vibe levels but you can set them anyway for now:
@dkemxr
Meaning i dont have a prop balancer and had to improvise. I stuck a pen through the hole and tried to level both sides of the prop. If u have any other suggestions I’m willing to give it a try.
Do u think its bcz of my transmitter? Im using a taranis x9d. I read somewhere, that one of the guys had a similar problem and he changed his controller and that fixed the jitters.i don’t have another transmitter. Any way to check if the output oscilations is bcz of my transmitter? Sometimes an antenna error msg shows up when i move the antenna but it goes away.
In another post i read the esc signals were getting noise so he isolated them. I don’t knw what that means. If u can point me in that direction i can give that a try too
Any suggestions for this? My battery is in the middle of the frame and attached via cable ties. Should i add double tape to the bottom?
Im assuming this has to do with a setting on the pixhawk?
No, it’s because of poor tuning exacerbated by high vibration. Properly balance the props, make sure there is nothing loose, tie down all cables but allow free play of the cables at the Flight Controller. It needs to move freely on the vibe mount. Set these parameters (Pitch showing, set the same for Roll):
ATC_RAT_PIT_D,0.002
ATC_RAT_PIT_I,0.100
ATC_RAT_PIT_P,0.100
Yes. Assuming you are using a Power Module configure and calibrate the Battery Monitor.
as i mentioned before i dont have a prop balancer. if there is another way to do it please let me know. i did try it my way again with straight rod, and to me they look balanced.
i made a new folder named " dave suggestions" and have added 4 new files to that. batt tied 1 &2 r with a double tape added to the battery and they did reduce the z vibrations somewhat but not completely
the other 2 r when i entered the notch filter settings and tried to set up the battery monitor. for the battery moniter i am indeed using a power module. the set the mah to 5200 , monitor to analog voltage only, hw ver to 4 cube or pixhawk (i have a very old version of pixhawk) measured the battery voltage and added that to " measured battery voltage". one of the notch filter logs i tried auto tune again but it failed. i havent made changes to the pids u suggested. i will charge batteries again and get back to u.
regarding the remaining z vibrations. i noticed that my gps rod is rocking slightly side to side… do u think that could be the source ?
I crashed the quad yesterday. One esc stopped responding and the black wire for the power distribution board came off.changed the gps(faulty wire) and upgraded the stand. I fixed all of that and noticed the pixhawk wasnt completely level on the anti vibration mount. I personally think that was the issue. Maybe u can conform my hunch? I also changed all 4 props and voila the problem is gone. No more jitters and it goes into auto tune.
Thank you so much for all the help and support. I really appreciate it.