ARMING_CHECK,1 or at least pick everything and just deselect one thing you are working on.
Your harmonic notch filter is exactly right - good work.
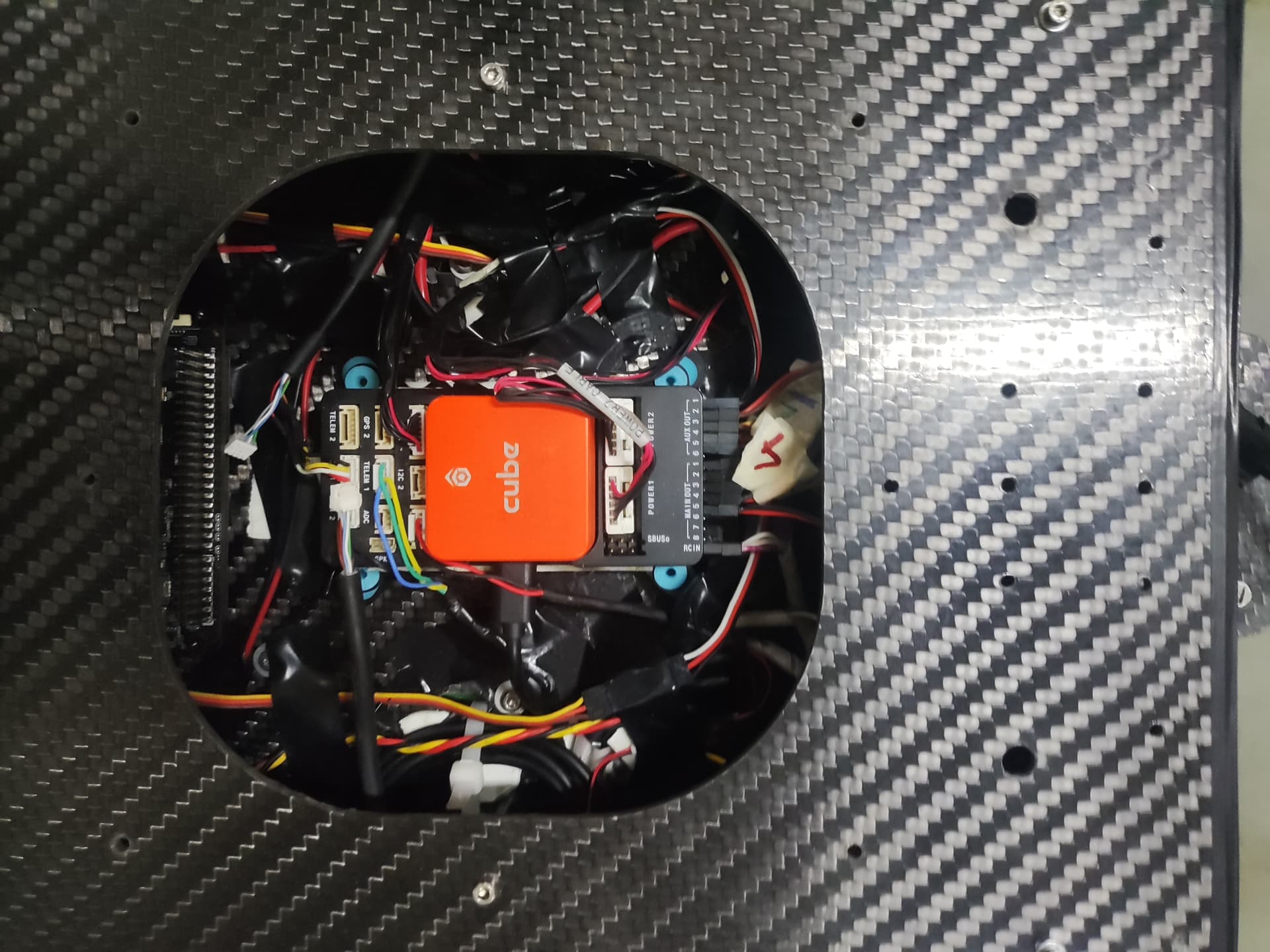
That is a bad antivibration mount for a Cube and carrier. You may not even need it, but if you do then use this design:
Also you need to tidy and secure all the wiring, and remove the USB connector from the side of the Cube. Use the USB connector on the carrier board with flexible wires.
Make sure the GPS cables are secured to the frame and not just “hanging”.
If those ESCs are T-Motor Flame then try MOT_THST_EXPO,0.4 or if they are Alpha try MOT_THST_EXPO,0.6 but if you do change the expo you need to retest and set MOT_SPIN_ARM and MOT_SPIN_MIN and maybe run a fresh Autotune.
If the ESCs are out near the motors then it will be a good idea to add extra capacitors in the power wires very close to the ESCs.
Are those T-Motor Navigator “Long Time” motors? Exactly what model and which props?
I’ve seen a number of them having poor attitude control mostly because people select props that are just too big - chasing that elusive extra minute of flight time.
I would set these parameters:
AUTOTUNE_AGGR,0.08 or 0.1
ATC_RAT_RLL_D,0.0041
ATC_RAT_YAW_I,0.08
ATC_RAT_YAW_P,0.80
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
BATT_FS_LOW_ACT,2
FENCE_ENABLE,1
INS_ACCEL_FILTER,10
PSC_ACCZ_I,0.70
PSC_ACCZ_P,0.35
and not all of those have anything to do with the wobbling, but I would say they are all important.
Let’s see the next log, and please mention more details about ESCs, motors and props.