I’ve tried everything to try and get my coax-copter to fly, it has plenty of thrust and to COG is low and centred. I’ve attached a gif of a failed take-off (it always pitches or rolls over on take-off) as well as the data logs from that flight. Any help would be greatly appreciated.
2021-04-11 10-28-31.bin (303.6 KB)
I cannot watch the video.
https://www.reddit.com/r/Pixhawk/comments/mp97t1/video_of_failed_coaxial_copter_takeoff_any_help/ Heres a link to the post I made on reddit
From a short flight it is realy hard to know. Have you done some string test before ?
A string test will not reproduce the same dynamic as during a free flight. But you can verify a lot of small things that are very hard to spot if your free flight is too short as this one.
I can’t see your prototype, but maybe your fins are too small and can’t produce enough torque to rotate the copter. This will mainly impact yaw control and you can very easily test it with a string (suspend the copter, potentially disable the pitch and roll PID, and check if it’s able to maintain its yaw slowly cranking up the thrust)
oh, you have 2 propellers so too small fins (maybe) won’t mainly impact your yaw, mine had only one so it was the case for mine.
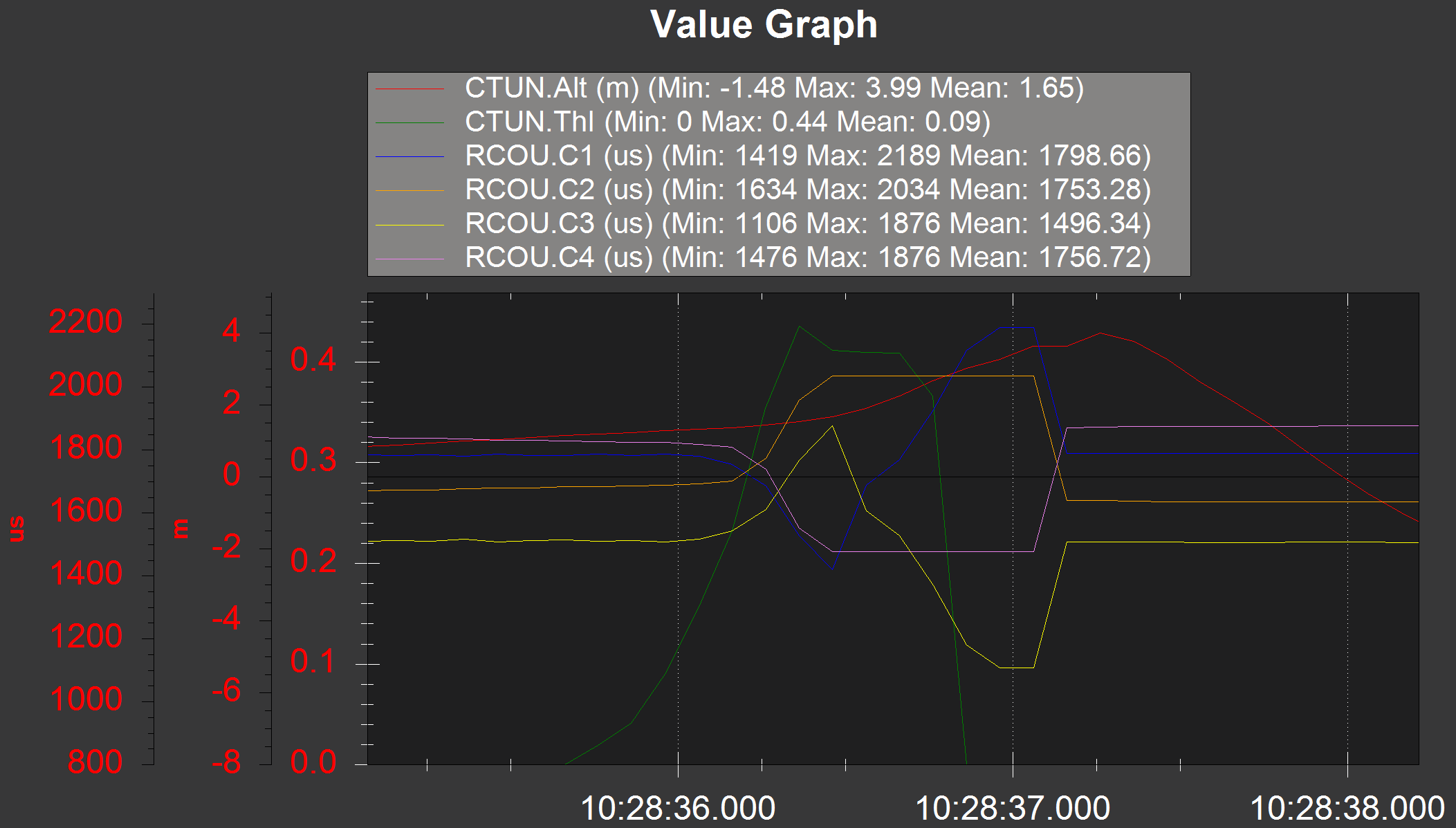
none the less, your fins/flaps got saturated during the flight. See RCOUT 2 and 4.
Could be an orientation problem (the front is the back and else) or a too small flaps problem. (or something else I don’t know)
Thanks for your assistance, I did suspect my flaps were too small, so have printed larger ones and planning on a test this weekend. I don’t think orientation is an issue as I set up the copter exactly as stated in the wiki, and orientation seems correct on the instrument panel on Mission planner. Will update on progress and with some more pictures after the weekend.
I don’t know why I remember you saying this now, but, your CoG should be as far as possible from the flaps (i.e. the place where the the force that makes you copter rotate is applied). This way the torque created by your flaps is maximized. That’s the rule, and being low or high doesn’t matter.
So my battery should be mounted at the top of my coax-copter, seeing as the flaps are at the bottom? I’ll try that, it’s the opposite of what my professor suggested though. He reckons my COG should be as low as possible.
I’m sorry for your professor, but he may have fallen for the pendulum fallacy. It’s a common misconception to think that a low center of gravity will result in a more stable system when working with forces (i.e. thrust) and not a pivot point.
I won’t go into detail because you have the video and the name of the thing. But be careful if you have to present your copter as a school project, because most people believe in the pendulum fallacy, be ready to strongly correct your professors if your presentation sparks an argument about it.
If you want a cool example of that, SpaceX’s SN(XX) rockets have their CoG as high as possible when landing, this is achieve with the re-entry fuel/ox tanks for being at the top of the rocket.