Hello community members,
I’m currently working with an Obstacle Avoidance radar system in Auto mode, and I’ve encountered some peculiar behavior. The obstacle avoidance type is set to the “Bendyruler” algorithm. I’m conducting tests to understand its performance, and I’ve run into some issues.
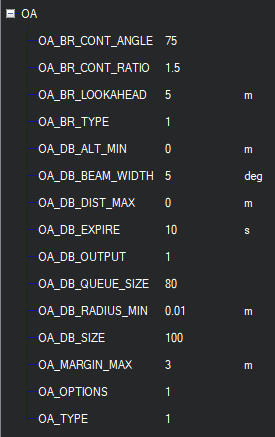
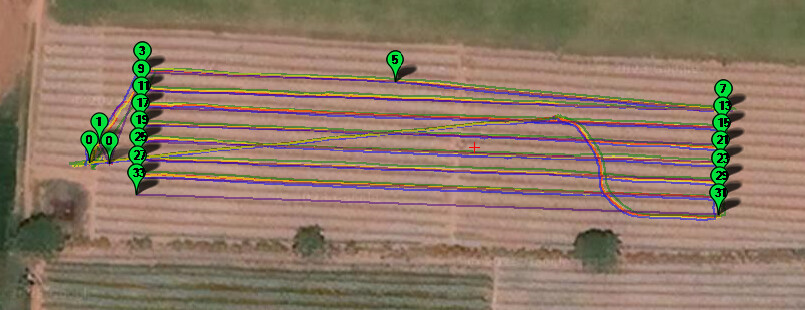
In my first flight test, the UAV detected obstacles, but its behavior was quite odd, I used the following parameters, and the UAV detected the obstacles. However, the behavior of the UAV was strange.
Logs Test 1
Params:
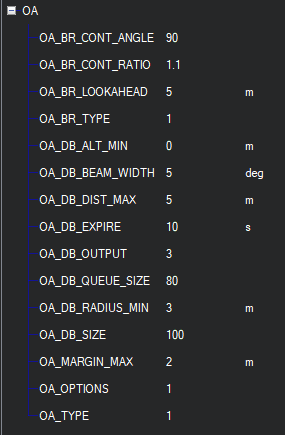
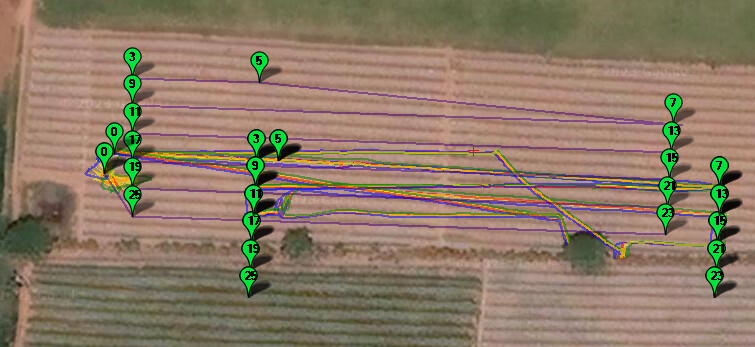
In the second test, I conducted two missions. In mission 1, the UAV detected the first obstacle and attempted to avoid it but performed unusual maneuvers. It then proceeded to the next waypoint. However, when it detected the second obstacle, it seemed to attempt to collide with it. The same behavior occurred in the second auto mission.
Logs Test 2
Params:
I’m looking for assistance in understanding how the Bendyruler algorithm works and how to control the behavior of the UAV. I’ve attempted to change various parameters, but it doesn’t seem to have any effect during flight. Any insights or guidance on this matter would be greatly appreciated.