RC 5 keeps switching to 1300 - Flight mode 2 - Alt-Hold for a moment. Not sure why. Could have something to do with how your radio is setup when you are turning it off? It’s only in Alt-hold for a short time but that might be enough to let it drift.
How can I see in log file, if commands are sent by Treansmitter (RC Radio - FrSKy) or by MissinPlanner (MP)(Telemetrie Radio)? What is the indicator for Connection Lost of RC?
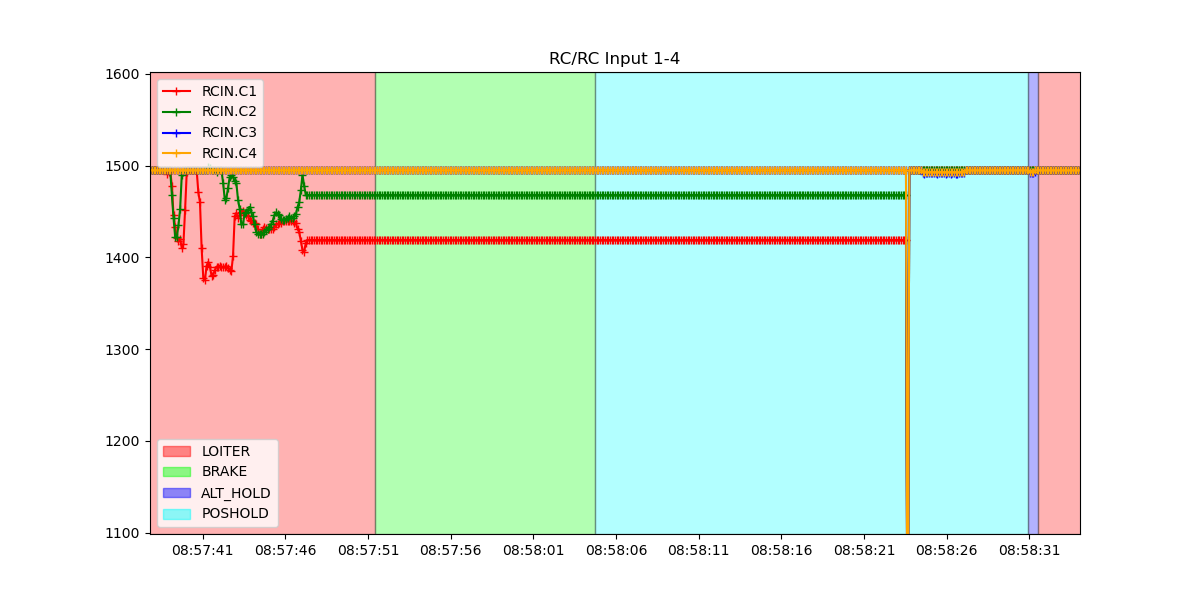
The drift behavior what I mean wasn’t that shortly after switching off the RC - it was the moment when tze RC is lost, copter goes into BREAK and then switsched it to Loiter via MP.
I’ve just been looking at the messages in the log file. For example:
2023-09-16 08:57:51.409 Error: Subsys RADIO ECode 2
2023-09-16 08:57:51.409 Error: Subsys FAILSAFE_RADIO ECode 1
2023-09-16 08:57:51.409 Radio Failsafe
Okay, I think I may have not fully understood the issue. There is certainly moments when the drone is going into ALT_HOLD because of the RC5 changing positions. But that may not be all you’re seeing. The other thing I noticed was that on at least one occasion the FC was still getting pitch and roll inputs during breaking and POSHOLD. The inputs look flat, meaning there is some kind of error because nobody can hold their hand that stable on an RC stick for that long.