I am using a Pixhawk 4 with Rover 3.5 and want to set a servo to 1 of 5 different positions (1200, 1300, 1500, 1700 & 1800) when it hits a specified waypoint then HOLD that servo position until instructed change to the next PWM value at another specified waypoint.
NOTE - Yes, I have read the documentation - http://ardupilot.org/rover/docs/common-servo.html
I have GroundSteer and Throttle to output 1 and 3 respectively, and have the servo connected to output 4 as RCPassThru.
In Manual mode it works perfectly from the transmitter as seen in the Servo Output:

In Mission Planner I created a basic plan from my house with the following commands:-
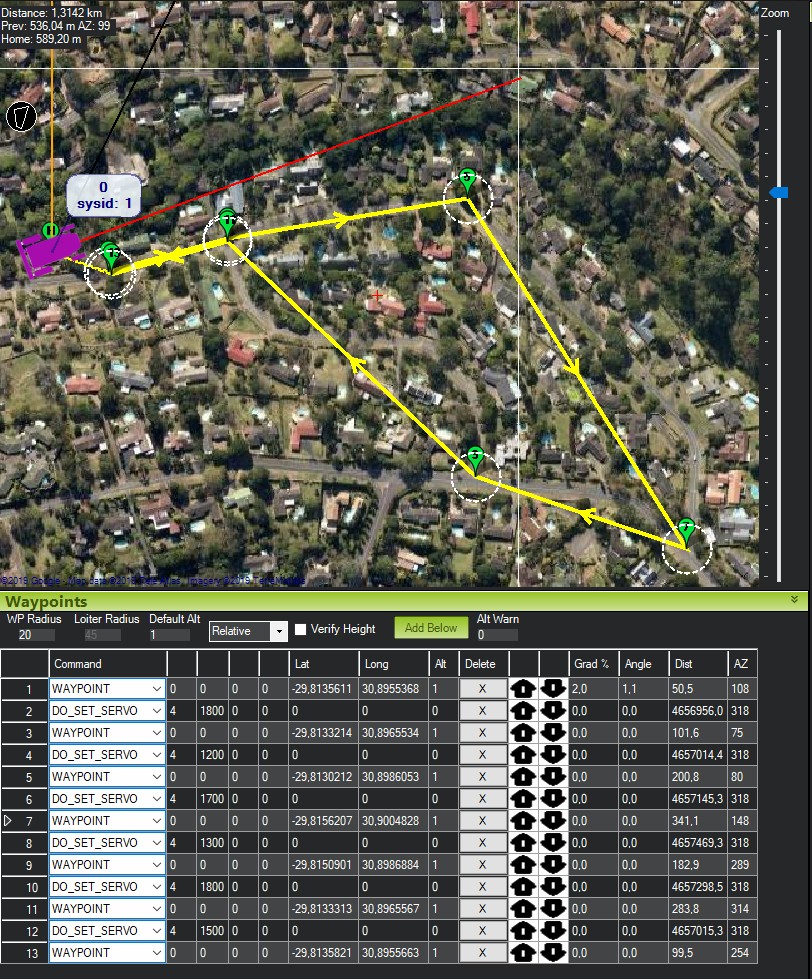
Result:
When driving out the flight plan servo does not move as each waypoint is reached.
What am I missing here?
Thank you