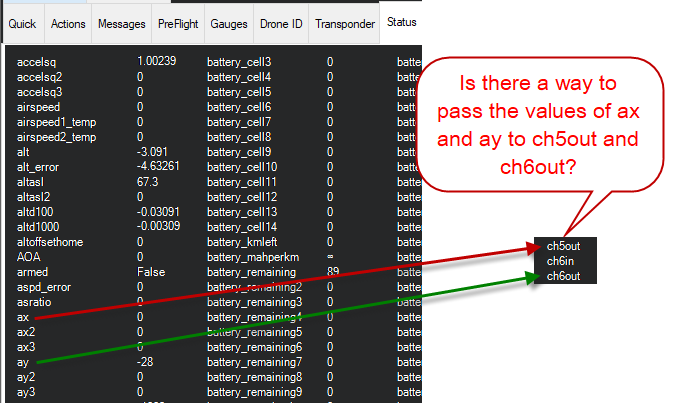
I was wondering if there is a way to pass some flight controller parameters to the channel outputs. I would like to pass the values of ax and ay to ch5out and ch6out respectively.
I was wondering if there is a way to pass some flight controller parameters to the channel outputs. I would like to pass the values of ax and ay to ch5out and ch6out respectively.
X and Y axis acceleration to an output? No, what’s available as an output is defined by the SERVOx_FUNCTION. For what purpose?
You might be able to do that with a Lua script. But it’s a rather odd thing to do…
I just want to use the accelleration data in Arduino to do something. I know you can use MavLink but the libraries are too complex for me at the moment. But it looks like the only way is MavLink. I will dig into MavLink then.
Use a serial port and Lua scripting. No need to compile that giant MAVLink library for something so simple.
I still don’t have the skill to write LUA Scripts. Do you know of a good online tutorial to learn how to write LUA Scripts?
If you can write C++ for Arduino, Lua scripting is pretty easy.

")
Wow very nice turorial. Thanks for sharing it. My board does not have an SD card (Kakute H7 V2) so I cannot use LUA scripting. Bad luck for me buying this board. And the Flash memory is playing up that it does not even record logs. I am not yet able to fix this until now whichs makes raising issues imposible as I cannot produce the log. But again thanks a lot.
This would seem to be true. Perhaps retire it before sinking more time into it?
Seems you’re interested in a lot of advanced features. Recommend a board with an H7 processor to continue your endeavors.
Yup, I’ve considered buying a new one. The Matek H7 was recommended but I read some issues in flashing this board so I hesitate jumping into another headache. Any other H7 boards there with the same form factor like Kakute H7? Looks like every board has there own pros and cons. But the one I have is really crap. Flash memory problem and arming problem.
Like what @dkemxr said, its time to retire the board once I find a better replacement. The copter is well tunned and flies well though with the help of @xfacta and @dkemxr tunning it. Really flies very well. I don’t know if I will be able to tune the replacement board exactly similar to this. Not an easy thing to do.
I don’t think there are any issues with flashing them. I have several. Flash the Bootloader 1st using dfu-util and then the firmware with Mission Planner. Never fails. There are other methods that can work also but I found this one to always work. The H743-Slim is the same form factor as that Kakute board. If you are tight on space the Mini version is smaller and still has an Sd card.
Second @dkemxr’s recommendation.
Tuning the new one shouldn’t be hard. Use the same filter and PID settings. They won’t change with a new processor.