Hi,
I’m working on a copter tailsitter.
During the vertical take-off, my plane started to precess like a top.
A coupling of yawing and rolling in crosswinds seemed to be the main reason. Thus we tried to apply NYT (No Yaw Torque) according to the ardupilot document, Tailsitter Planes — Plane documentation
By the way, I have two questions.
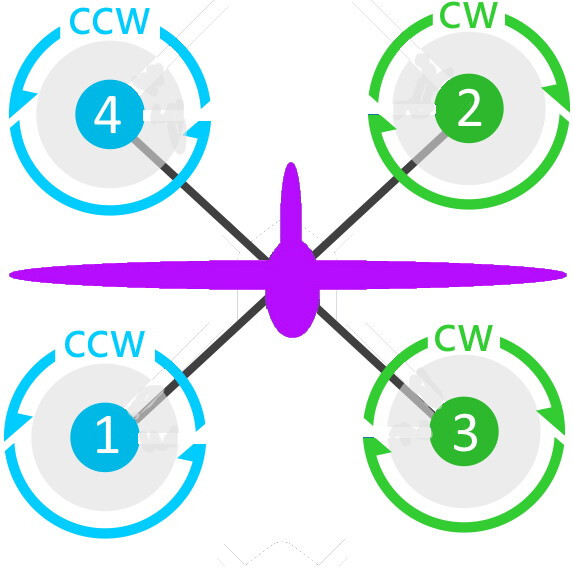
1. Motor Configuration
The following NYT motor layout seems okay to control pitch but yaw is expected to be generated when I try to control roll. And it really was. So it was really difficult to control the vehicle when I used the following motor layout. Is it really working concept?
2. How does the NYT affect to the system parameters?
Are there any parameters that are affected by setting the frame class to NYT?
Thank you and have a nice day!
Geon-Hong.