Hi,
after lots of tuning, and following the complete tuning guide, my copter now flies pretty nice.
But sometimes there is still a little bit of wobble that seems like you could tune it away, or maybe I am wrong and my copter ist flying as good as I think it is. I already examined some logs, and everything seems to be fine. I would be very happy If somebody more experienced with log analysis could take a look and tell me if its a good tune, or what I can improve.
Hardware is a 6S 340Kv 18" 5Kg heavy copter (including battery) with a sony alpha6300, running on a cube orange.
this one is flying a auto mission:
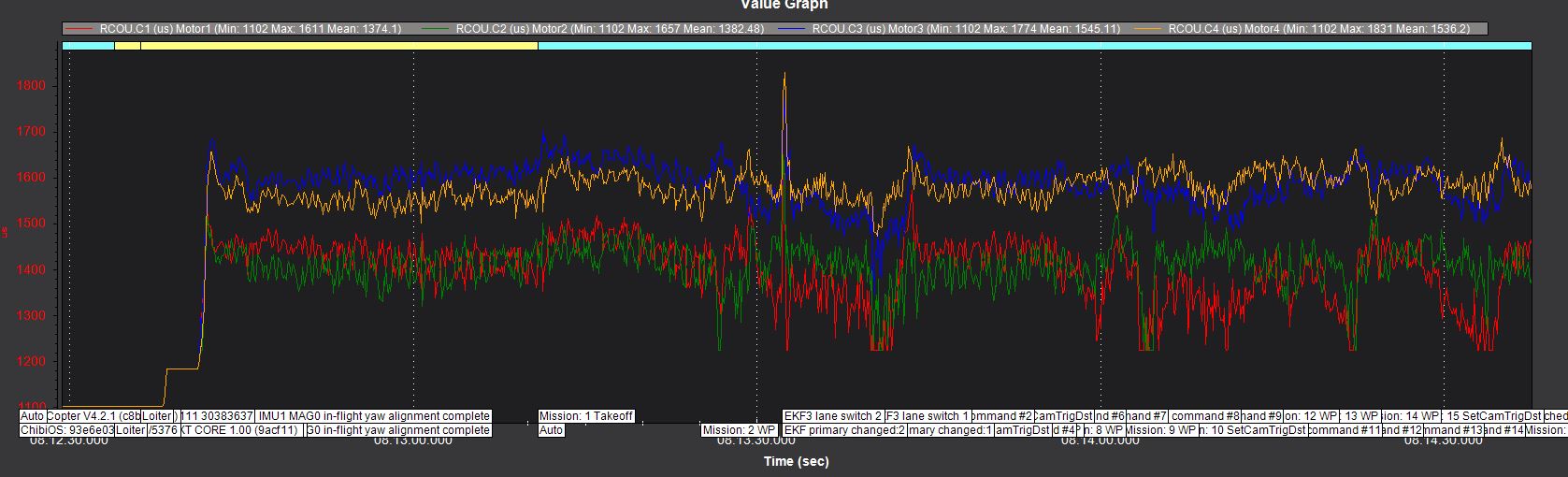
You have a fairly significant mechanical Yaw bias resulting in Motors 1&2 (CCW) bouncing off of MOT_SPIN_MIN. Check the usual suspects; twisted motor mounts or arms. Try to better level the props.
Tuning isn’t bad but there is some oscillation. I would set these as per the tuning guide with respect to MOT_THST_HOVER:
PSC_ACCZ_I
PSC_ACCZ_P
And, you will get a better look at the FFT results if you set this to either 0 or 2 depending on whether you want to see pre or post filter results.
INS_LOG_BAT_OPT
A log of an Auto Tune session is not of much value.
So, I tried better leveling my Props, but I just cant get it right. my frame is a Tarot Fy650, and It seems to be impossible to get all the arms straight. there is one arm that has a slightly different angle than the others, and I guess thats it. I just ordered a new frame to test if that also happens with a new frame or if its just this one.
I also reduced my PSC_ACCZ PI values, and it seems to help! (I didnt want to put them as low as the guide says, as it would be below the “minimum value” that MP suggests)
one thing I find odd is that during the last mission there was a cricital warning “Vibration compensation on” although I thought vibration levels were really good. upon reviewing the logs, I noticed that IMU0 and 1 are fine, but IMU2 has more than twice the acceleration values thatn the other two… what could that be?
and also, is it normal for the copter to twitch when changing EKF lanes?
Ignore those values and set the parameter as required. Those range values are not up to date.
You will have to address the vibration levels overall I think. The 3rd IMU on the Cube is not vibe isolated so it’s the reason it has such crazy high vibe values. You could work on Vibe reduction on the craft or disable the 3rd IMU (INS_ENABLE_MASK). You definitely don’t want Vibe Compensation to be triggered. BTW-That can be triggered from more than just high vibration but that can be a factor.
And somehow you have to get a handle on the Yaw bias. Motor 1 is consistently bouncing off of minimum which will compromise stability. Read thru this Wiki entry and perhaps lower MOT_SPIN_MIN: Motor Range
ok, I will set them.
regarding the Vibration levels, I hard mounted the cube to the frame because I read that its better to hardmount the cube, so I guess its no wonder the 3rd IMU has such high values. the vibe values of the first and second IMU seem to be really good I think? so I will just disable the third IMU or soft mount the cube carrier.
and yes, I will take care of the yaw bias. just need to make sure that its not a misconstructed frame in the first place, but as I said, I already ordered a new one.
Yes, that’s the recommendation but anecdotal evidence suggests that isn’t the best for all frames. Some have added a mount and benifited but I saw a post recently where they removed one for better performance.
so, after some days off, I completly rebuilt the drone using new parts and spent extra time aligning everything. I think the yaw bias is solved now, but I would be happy if you could confirm it.