Hi there,
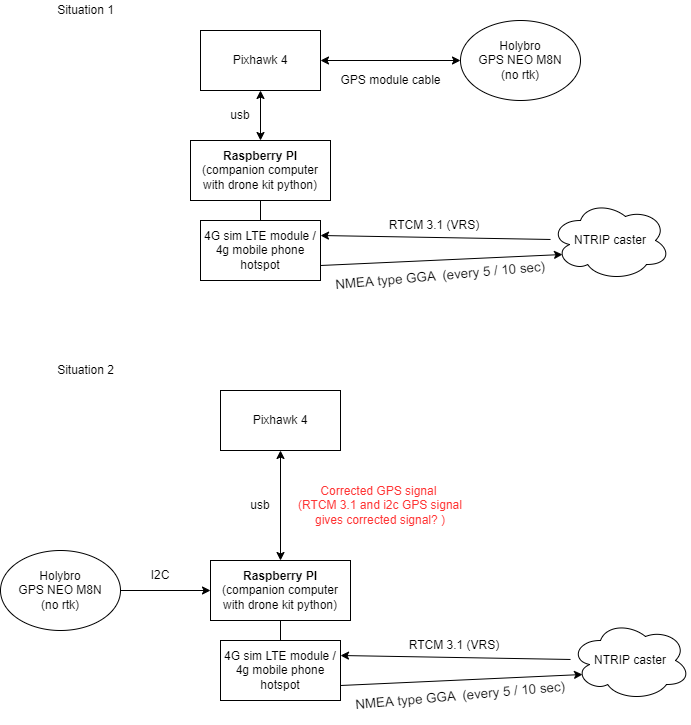
Is it possible to go from situation 1 to 2 (see picture below)
As far as my knowledge goes at the moment. RTCM 3.x can be used with a M8P and a F9P when you use these GNSS receivers then it is possible to input the RTCM correction data and the GNSS module does a magic calculation to get better precision (RTK?) and gives this to the Pixhawk.
My questions are:
Is it possible to to create something like situation 2, where the GNSS module is connected to the PI (so its sends it raw data and then the PI combines it with the RTCM data from the NTRIP caster) and then the PI gives the corrected signal to the Pixhawk?
- Is possible? like maybe with some tools from RTKlib?
- Does it matter if you would choose the M8N (no rtk) or choose the M8P or the F9P? (do the m8p and the f9p generate relevant data that the m8n has not, to do the correction?
- can mavproxy act as a NRTRIP client that sends the RTCM data from the caster to a GPS module that is connected to the Pixhawk (If the M8N is not working, will it work with the F9P?
- how to send the NMEA GGA message to the NTRIP caster (needed for the VRS?), is this possible to send trough mavproxy NRTIP?
I’m also able to get other mountpoints from the NTRIP caster (rtcm 2.3 , 3.0 etc)
Situation 1: is the actual situation
Situation 2: is the hypothetical situation.
I’m really curious…
Thank you in advance
Rick