Hello, seniors in technology.
I am writing this because I have a question.
I am making a boat with two motors using Ardupilot Rover firmware.
While making it, I was thinking about how to return to the return point in case of an emergency while the boat is floating on the water. I found out that if the main motor cannot rotate due to grass/trees, it cannot return.
In this case, a person has to go to the boat and rescue the ArduBoat.
So, the method I would like to suggest is to use four motors.
Two motors (named A and B for easy explanation) are always used, and if the main motors (A/B motors) are unavailable, the backup (emergency) motors (C/D motors) are driven to return to the return point.
The way to convert a motor to a backup motor is to use the channel of the remote controller.
Let’s take an example.
Motor A/B = Main motor. (Servo Output 1/3)
Motor C/D = Emergency motor. (Servo Output 2/4)
Controller channel 10 = Motor changeover switch. (RC IN 10)
Set up like this.
-
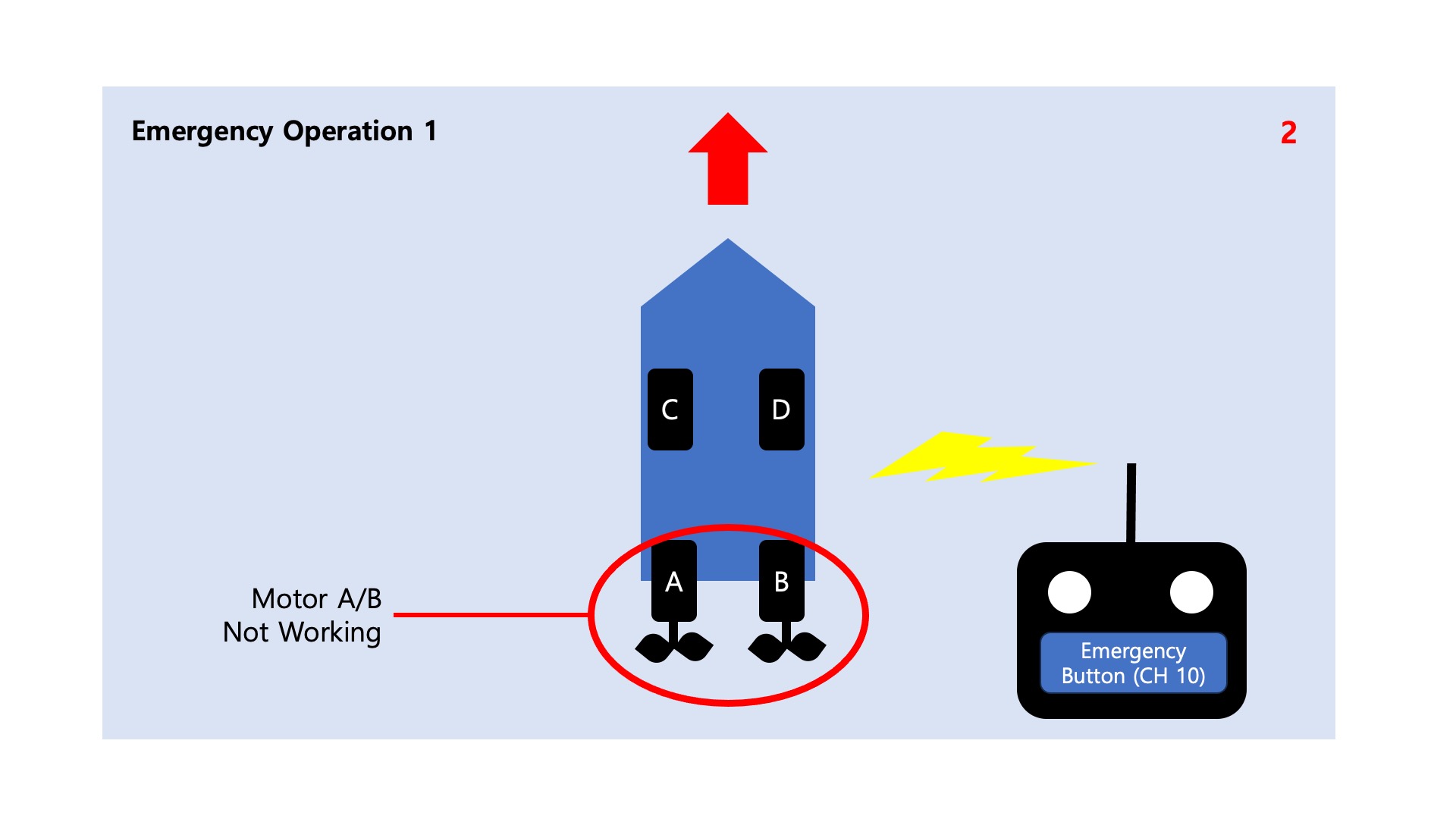
Started operating using motor A/B for work.
-
During work, motor A/B reports an abnormality in operation. (Forward motion is not possible/operation is not possible)
-
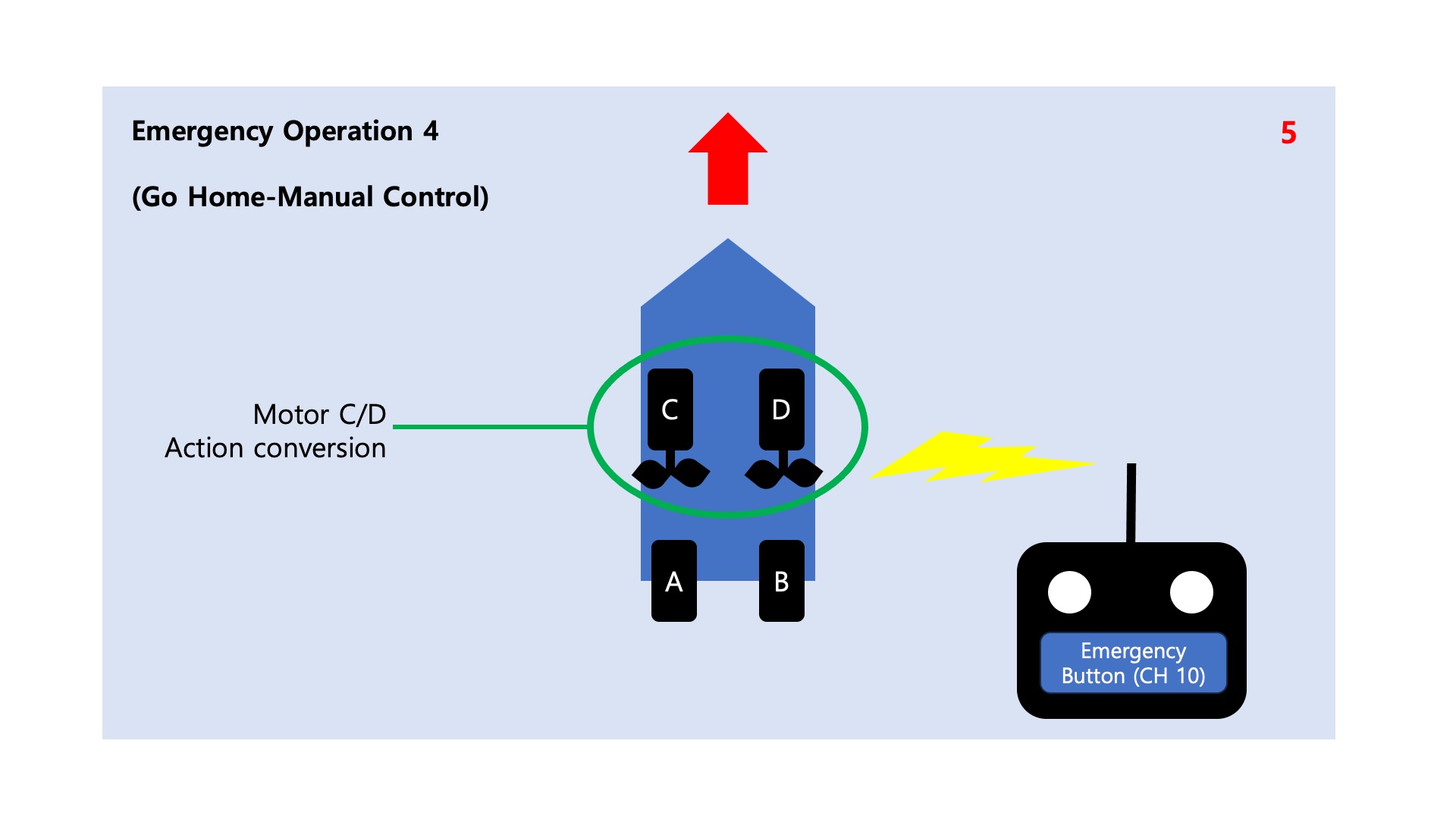
Stop operating and turn on controller channel 10.
-
The signal value changes to motor C/D and motor A/B does not operate.
-
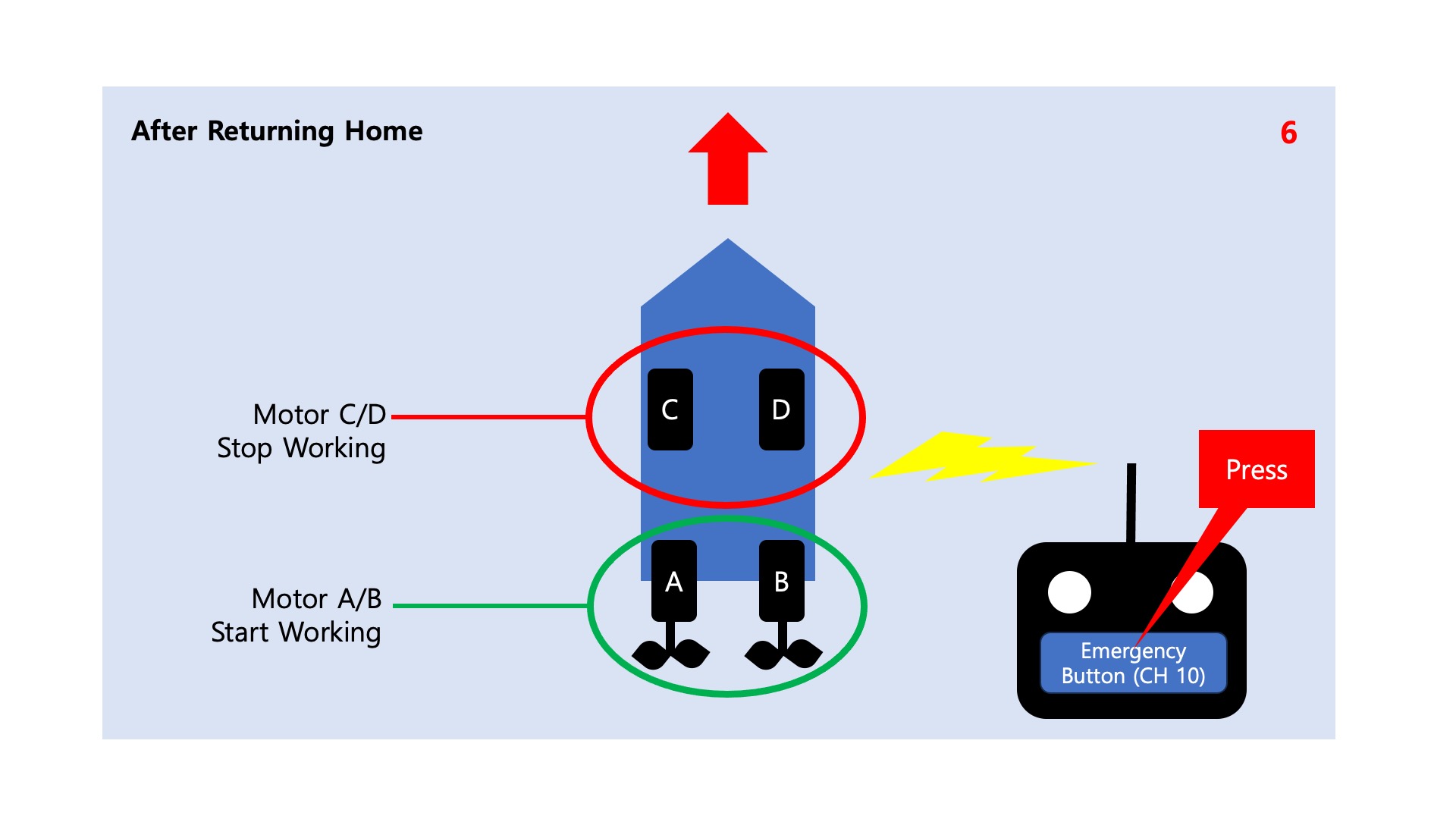
Return safely to the starting position using motor C/D.
-
If safely returned to the starting position, repair motor A/B and turn off controller channel 10.
-
Motor A/B can be used again.
I am thinking of this workflow. I lack a lot of software skills, so I tried to implement the technology using PWM relays for the workflow I had in mind.
However, after searching a lot, it seems that I can actually implement the workflow I have in mind using LUA scripts(?).
What do you think, seniors?
How can I actually implement this workflow?
Can I actually implement it using LUA scripts?
Thank you.