You could connect a motor signal wire to two ESC inputs, so you are driving two motors at once - I predict instability and difficulty tuning.
It would be preferable to drive all eight motors individually.
I know of another company doing something similar and they had to invent custom ESCs with IMUs so the power to each motor could be controlled and distributed based on input and attitude.
It’s not as easy as first expected.
Thank you for your quick response but I can’t understand the meaning of
" You could connect a motor signal wire to two ESC inputs, so you are driving two motors at once".
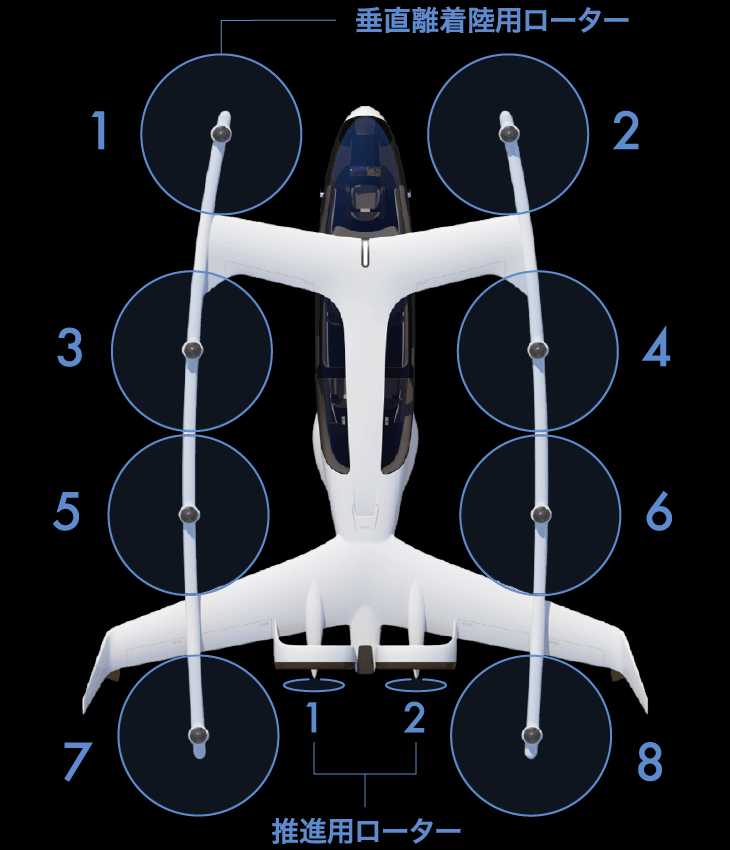
My idea is to treat motor groups 1&3, 2&4, 5&7 and 6&8 as an one motor individually. Each groups is connected with the 4-in-1 ESC’s 4 output ports and the ESC’s 4 signal lines are connected with the FC’s appropriate 4 output ports. Thus I believe motors 1&3 etc work as an one motor and the FC controls the plane as a pure quad plane. What problem do you anticipate for this idea?
Fast of all thank you for your reply. I have checked once again how brushless motor works with the ESC. I understood my mistake.
I had thought there is no control signal comunication between motor and ESC because there are only 3 power cables and no signal cable between them, so it might be possible to manage 2 motors with 1 ESC. But the reality is there is a comunication about the motor phasing between the motor and the ESC through power line so that one motor needs its own one ESC.