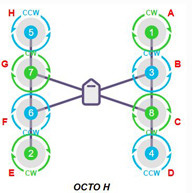
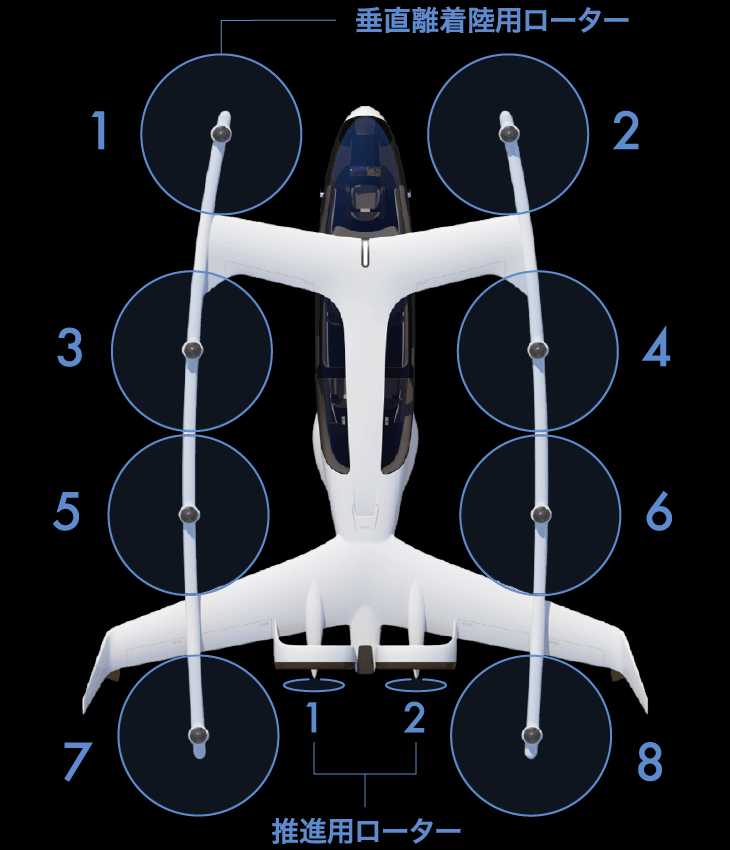
I am now building an OctoPlane like this;
When I designed it I did not know that this is classified as Octo H and I planned to treat it as a QuadPlane with X frame type. My idea was to combine motor 1 with 3, 2 with 4, 5 with7 and 6 with 8 by connecting their ESC signal lines with Y harnesses. Motors 1&3 and 6&8 are CW and motors 2&4 and 5&7 are CCW. Thus, Motors 2&4 are connected with output 5, 5&7 are with output 6, 1&3 are with output 7 and 6&8 are with output 8.
For yaw control augmentation I made all motors are tilted outward by 2 deg.
Is this my design OK?