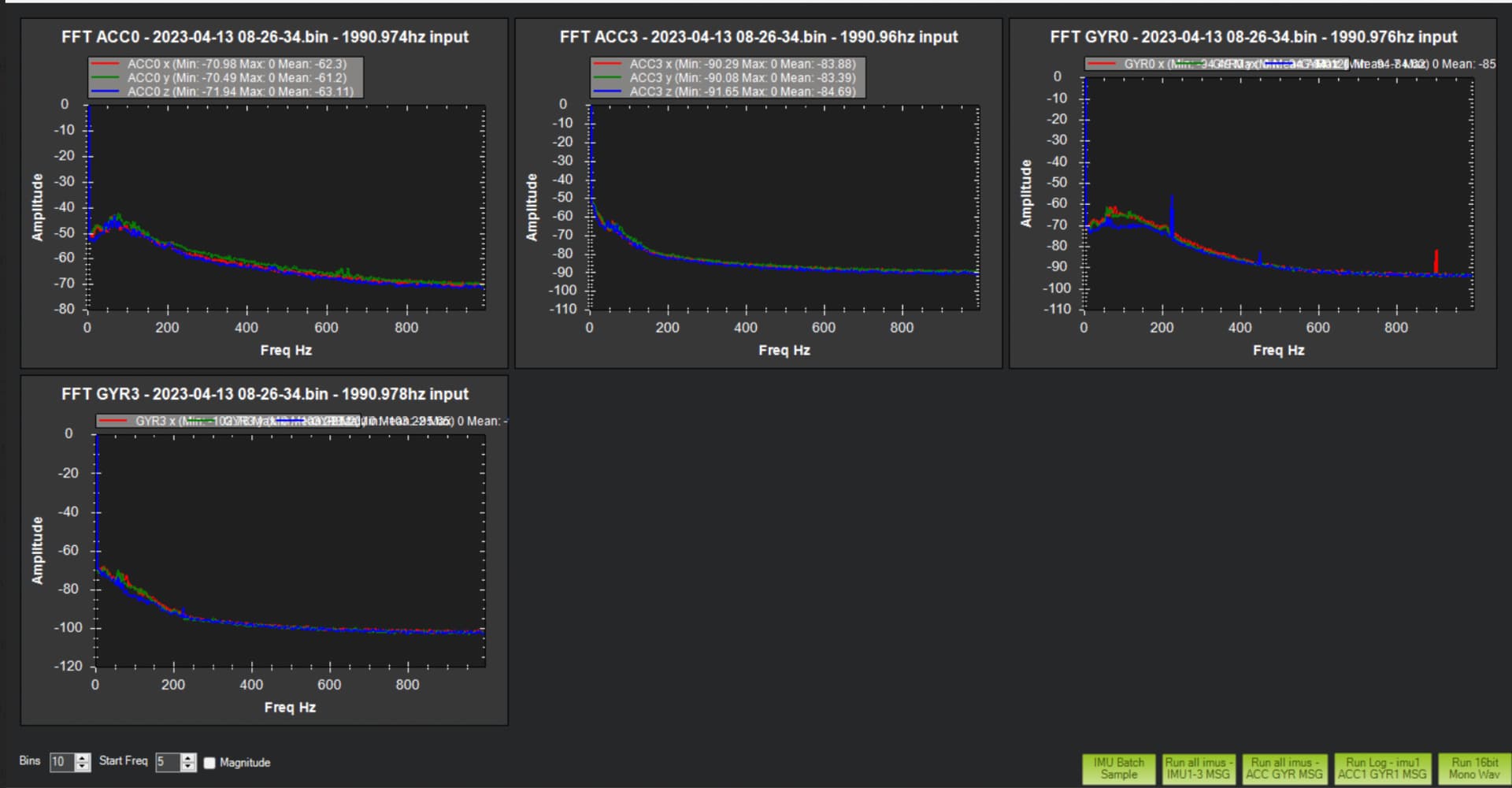
The inflight FFT seems to have trouble getting down below 80Hz without some special attention. I believe there’s an improvement on the way. When you have INS_HNTCH_MODE = 4 then it doesnt matter what you put for the Freq and BW values.
Normally the frequency associated with 10inch props is about 90 Hz give or take.
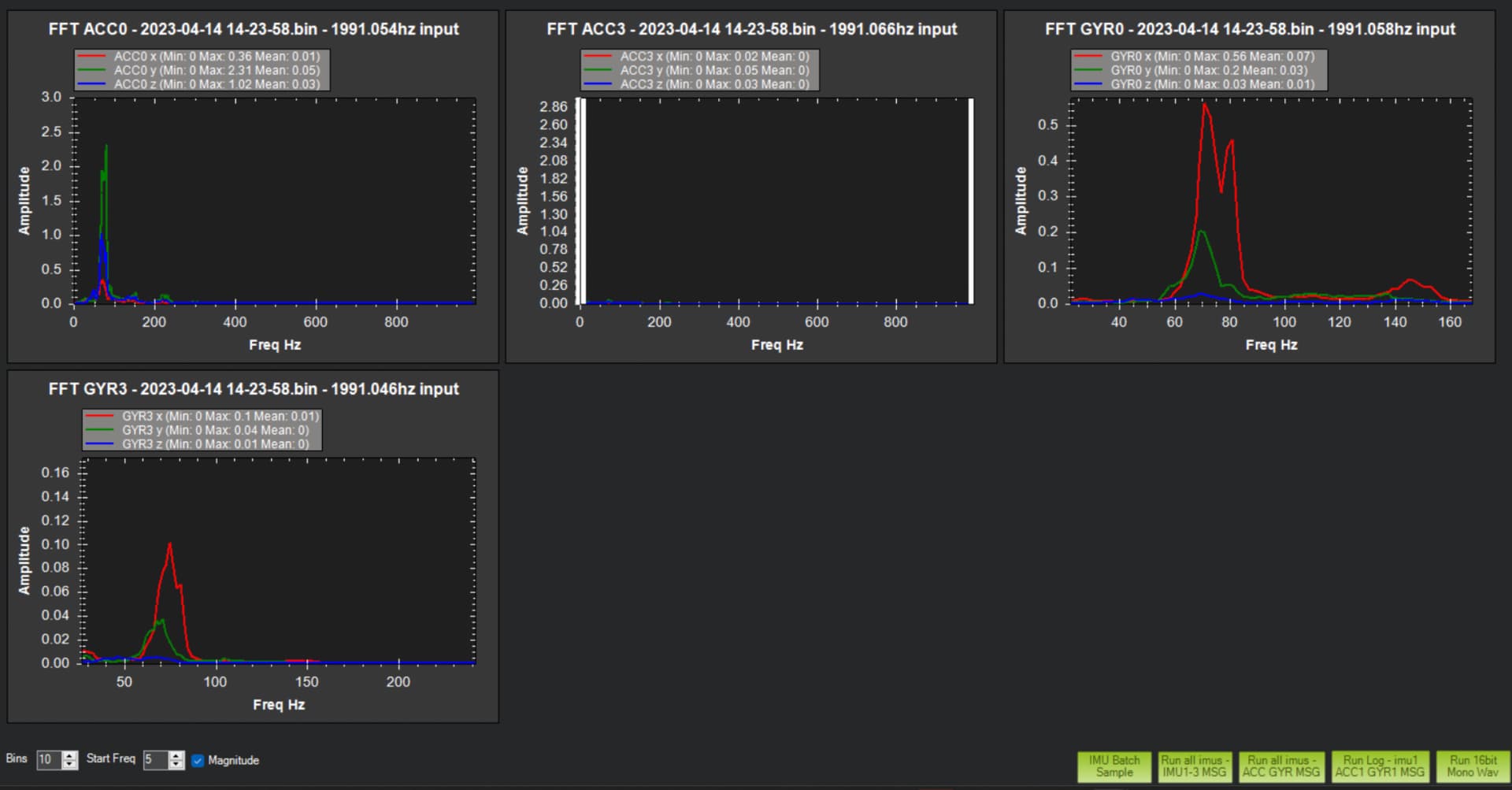
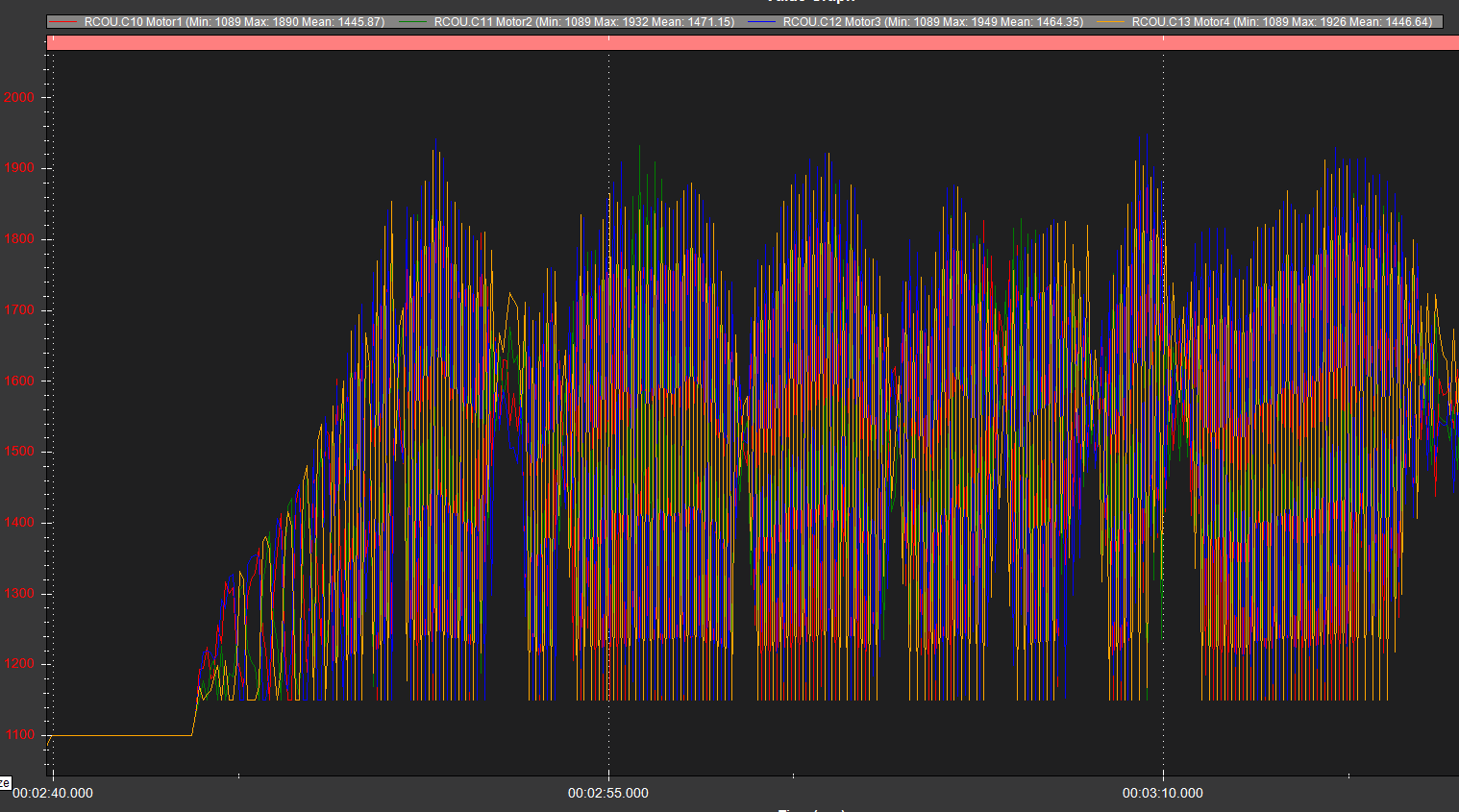
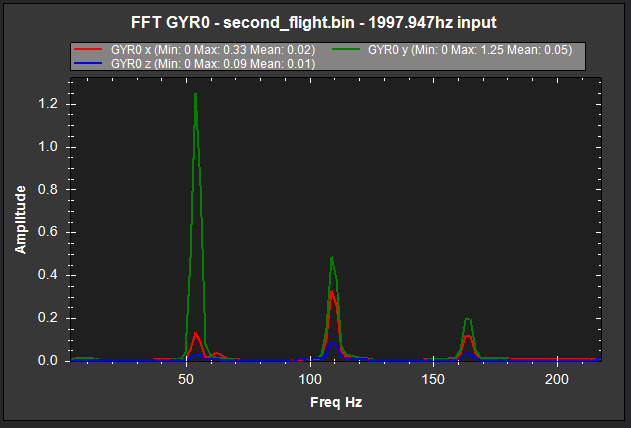
So the 54Hz peak in this graph is likely a side effect of the bad motor oscillations seen in the next pic.
The 109Hz peak is closer to the true value, but with those oscillations we can not tell for sure yet.
Bad motor oscillations
Most of the problems will be caused by this X axis vibration. You will have to take positive steps to solve this before more flights. It could be prop or motor balance, or wires pulled tight to the flight controller, or something touching the flight controller. provide a couple of photos if you can.
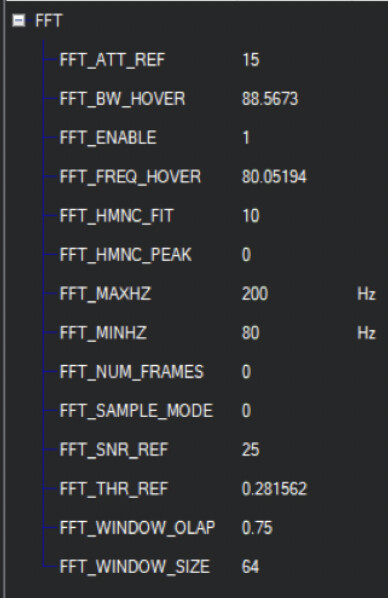
For the filter I suggest you set:
FFT_ENABLE,0
INS_ACCEL_FILTER,10
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.14
INS_HNTCH_FREQ,90
INS_HNTCH_BW,45
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_OPTS,0
And to tame the oscillations a bit and hopefully improve stability
ATC_ANG_RLL_P,6.0
ATC_ANG_PIT_P,6.0
ATC_RAT_RLL_P,0.11
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_D,0.003
ATC_RAT_PIT_P,0.11
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_D,0.003
EDIT:
I see you do have BATT2 voltage and current monitoring, I must have missed it.
I cant tell exactly what sort of battery you have though, the voltage values you have dont quite match any normal values. What battery is it?
end edit
I highly recommend you configure the BATT voltage monitoring at least, and current if you can. This gives
- thrust scaling → MOT_BAT_VOLT_x
- safety → BATT_x_VOLT , BATT_FS_x
- useful diagnostic data
Your Cube should have come with a “power brick” and it will be a simple matter to enable the BATT monitor, defaults will work for you.
BATT_MONITOR,4
After you enable a battery monitor, you need to reboot the flight controller, then connect to MissionPlanner / Initial Parameters and put in you battery cell count and check the chemistry type. Also select “Suggested settings” and accept all the voltage and safety related values it offers and “Write”. No need to accept any of the Accel or filter related values since you have them already.
Since you are using DSHOT you should also set up the BLHELI telemetry data - this is invaluable. It’s quite easy too - just connect the “telem” wire from the ESC to a spare serial port, RX pin. If you have individual ESCs you can join all their telem wires into one then to the serial port RX pin. The ESCs all communicate together to the flight controller on just one telem wire.
And set these according to your serial port number:
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
SERIALx_BAUD,115
SERIALx_OPTIONS,16
SERIALx_PROTOCOL,16
You can even set the BATT voltage monitoring to use the ESC data if you dont have any other voltage monitor.
Dont race out and do another test flight until you are sure the vibrations are solved, or at least improved a lot. But you can set ALL of the parameters I’ve provided ready for the next flight.
Use Stabilise mode again, and if behaviour is good then use AltHold mode for a while and do some gentle pitch and roll. This flight will allow us to check and adjust the harmonic notch filter and more.