Hey Everyone,
I am currently working on a capstone project and we are trying to do a copter design with 4 Motors in the front and one motor in the rear. We are using Pixhawk as our flight controller and in Ardupilot we have set the copter up as a “Y tricopter” with the front four motors connected in parallel and one motor in the rear with a servo mechanism to stabilize yaw.
From our calculations, it seems to not be a physical issue with the COG and COT but when conducting flight tests of our configuration we are having major roll issues and are now wondering if that is due to our configuration itself. This has lead us to belive it is a control problem or flight control problem.
I have found some things online about some people doing something similar to this where they have the it set as tricopter with a Y frame but have two pairs of motors up front where each pair is connected using a Y cable.
Conceptually, I have seen that the FC has incomplete information, such as not realizing that the “front-left” motor is actually two separate motors on a Y cable but that it would be able to compensate via the PID loop.
-
Is the roll issue something we can account for by tuning such as changing the PID values/gain values or is this not possible due to our configuration?
-
Would we have to tell the Pixhawk that there are five motors somehow or is it fine that we have two pairs of motors connected together in the front like our configuration?
-
Has anyone ever done anything like this that someone could point us to?
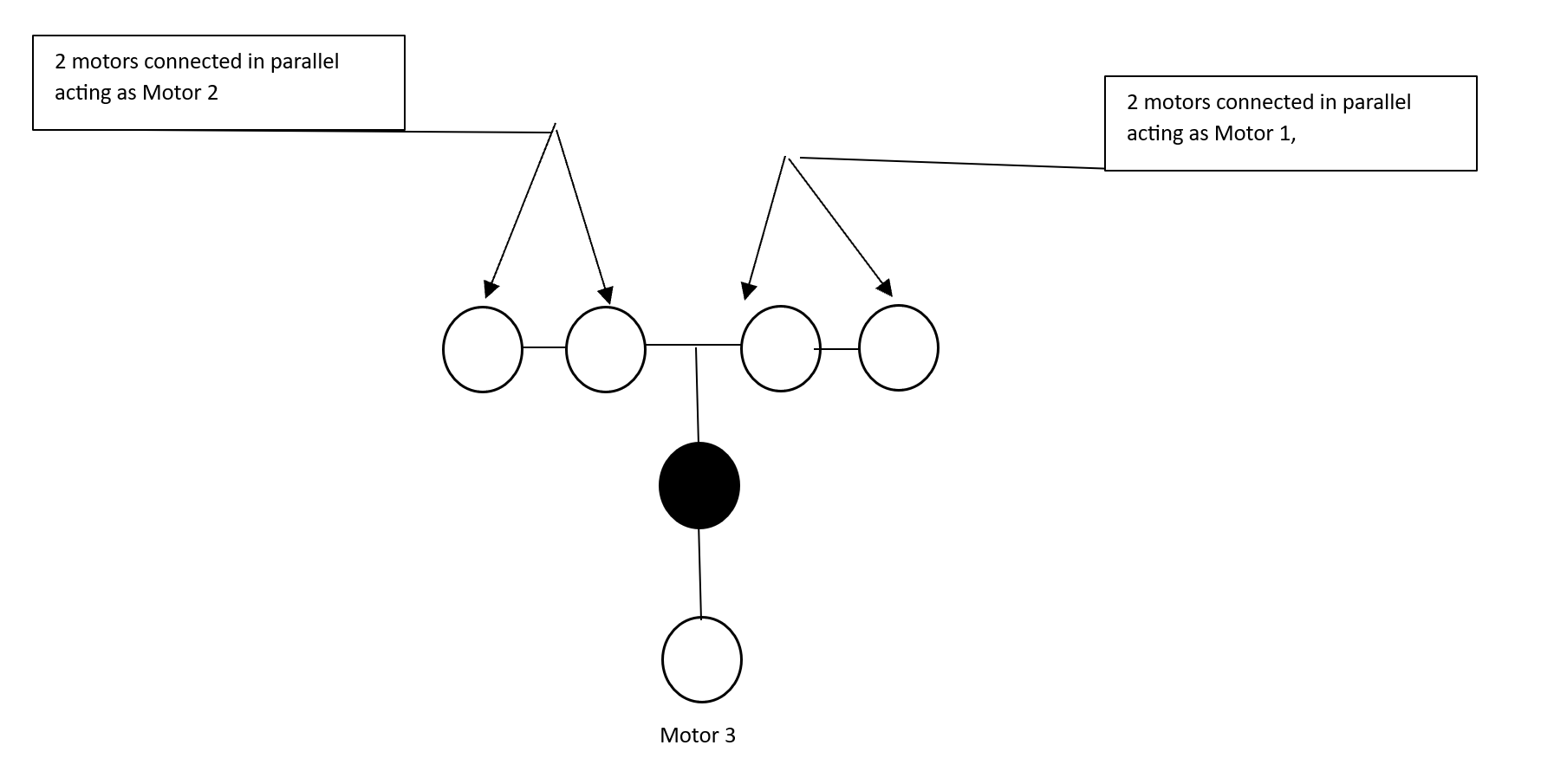
Something like the configuration we are using:
Any help is greatly appreciated!