Hi,
I have performed some test flights using an IRLOCK. It seems to be working ok, I’ve tested it in three different locations making a couple of missions in AUTO mode and the landing accuracy was around 30 cm. The only issue I have is that in almost every test, the copter starts descending, hovers at about 40 cm over the target, lands and then bounces up. After that, it lands again and the motors are disarmed.
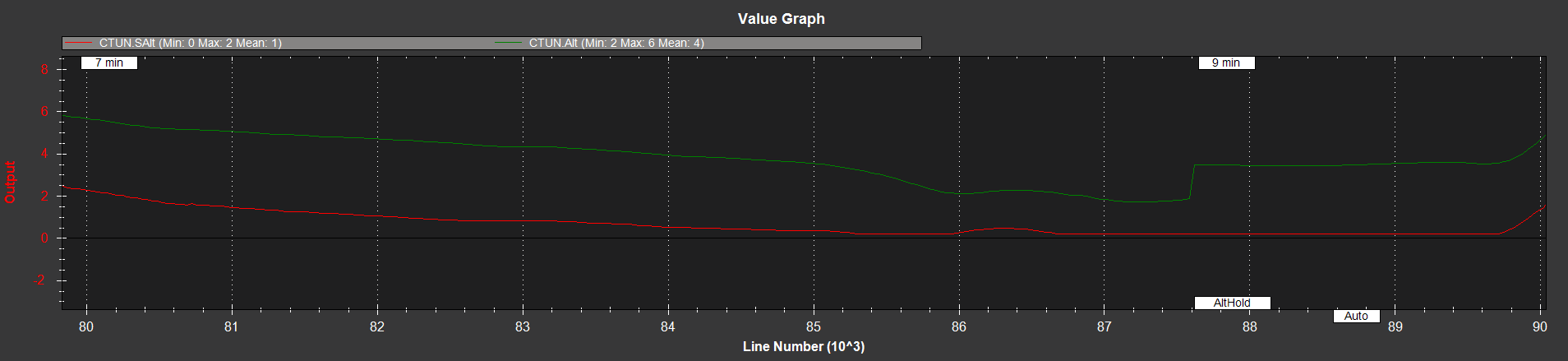
I’ve checked my logs and there seem to be no issues with my sonar, since it shows stable readings below 3 m (as shown in the picture below). The logs also show this bouncing when the copter is about to land.
I should also add that the vertical distance between the IRLOCK and the beacon is around 40 cm, my only guess is that maybe they are too close when the copter lands. The log for my last three attempts is attached below. I hope you can shed some light on this issue.
Thanks in advance!