Hi!
What parameters are controlling the speed and acceleration when IRLock aquires the target and corrects the position during landing decent?
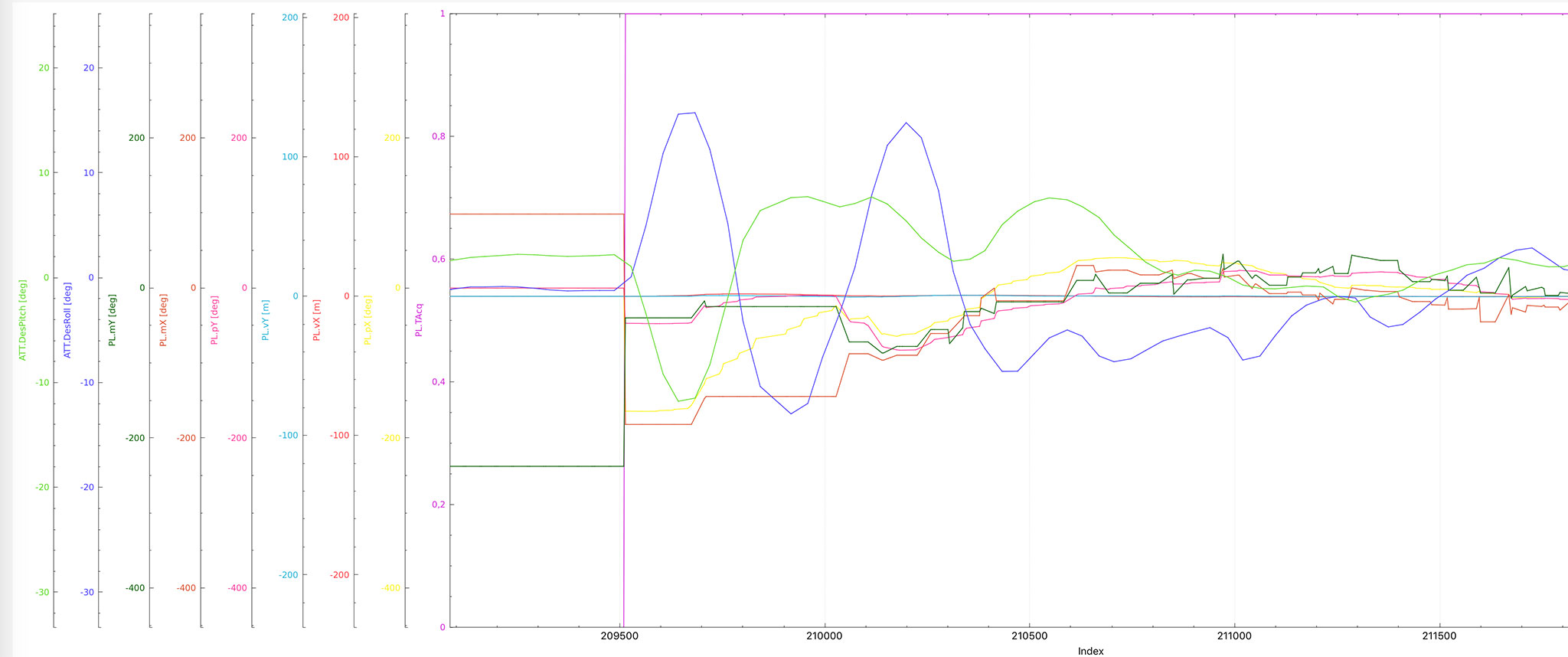
I have the problem, that IRLock works good so far, with one issue: As soon as the beacon target is aquired (in my case at 17.5m AGL), the copter does a very aggressive position correction. It “jumps”. It seems to change its position with very high speed and acceleration, which leads totally unnecessary to very high roll and pitch movements. Because the distance is quite short (<1m), the copter breaks instantly again.
So, is it possible to reduce this aggressivity somehow? Can anyone (maybe @ThomasSFL) can tell me, exactly which parameters define this movement speed and acceleration?
Beside this, the IRLock works very well (using the Kalman filter), and the copter itself has no further issues. It’s tuned and flies quite reliable (5kg cam hexa).
Thanks,
Stefan