As with a few other owners, I too am having flip after landing problems. I thought I would share my experiences and findings. Today I had the gimbal attached, descended in loiter mode and it flipped shortly after touchdown. This time resulting in a scratched up top shell, brand new props damaged and bearings in one motor are now very noisy when spun by hand.  I have tried to attach the log to this post but it is above the 5mb limit. At this point I will try sending the files to 3dr support directly. I would like to know how to avoid this in the future, as this is an intermittent recurring event. Some complete flips, some near flips where one side lifts an bobs while trying to disarm. I have recreated the situation without props. Try to disarm before motors they idle down ,their speed increases or remains constant, commands are ignored until altitude increases, Iris lifted from ground, or arm command (down right throttle) is given then disarm (down left throttle) is accepted. Other than this the copter performs perfectly, it is an amazing machine. Just saw the tip about compressing the file so I gave it a shot.
I have tried to attach the log to this post but it is above the 5mb limit. At this point I will try sending the files to 3dr support directly. I would like to know how to avoid this in the future, as this is an intermittent recurring event. Some complete flips, some near flips where one side lifts an bobs while trying to disarm. I have recreated the situation without props. Try to disarm before motors they idle down ,their speed increases or remains constant, commands are ignored until altitude increases, Iris lifted from ground, or arm command (down right throttle) is given then disarm (down left throttle) is accepted. Other than this the copter performs perfectly, it is an amazing machine. Just saw the tip about compressing the file so I gave it a shot. 
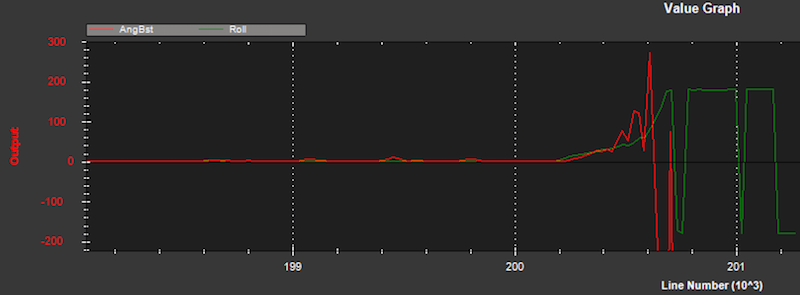
Not sure if this helps but the copter appears to start a roll, then the angle boost (angbst) really cranks up. The angle boost seems to try to catch the roll which is what it’s designed to do. But it goes over anyway as the angle boost really cranks up until it’s 180 degrees.
Here’s my 2c guess on what might have happened: You had the gimbal and camera attached. It came down in loiter mode. It started a slight roll on the ground for some reason after at least one of the legs was already on the ground. The long legs used for the gimbal/camera have rubber stops at the end that can act like hooks. So the combination of angle boost causing motor acceleration and the leg hooking flipped it on it’s back. Unfortunately angle boost revving those motors and it hitting the ground upside down is not a great combination for shell, prop and motor health.
I had a long look at your logs and I’m very inexperienced, but I have an IRIS+ sitting in front of me and I’ve experienced something similar but on snow which is a much happier experience. Hope some of that helps.
Regards,
Mark.
Be careful when landing near buildings. What happens is the GPS signal goes through the building and gets distorted and causes the GPS position to move. Even though it shows 12 sats and 1.7 HDOP your position will move. I have had a copter come right at me.
Since you were in Loiter mode the copter is using GPS for it current position and if it moves when you are on the ground it will try and correct by flying in the opposite direction.
Look at your GPS plot in mission planner and it shows you were moving all over the place when you landed. If that’s not what you saw then the GPS was drifting and caused the crash.
I use Stabilize(Not programed as an option on IRIS+) or Alt Hold to land near buildings. It’s safer that way.
Mike
Thanks for the replies, The landing was on concrete so there was nothing to hook the legs. The copter began bobbing and flipped after touchdown. I was attempting to disarm but it flipped before I could get it shutdown. Copter was steady on decent, and I always get that GPS drift when setting on the ground, even when nearest tree / building is 50’. I will do all landings in Alt mode from now on and see how that goes. I still don’t understand what started the roll with throttle down (below half way) and the copter on the ground. As said earlier this has happened more than once and I read similar experiences in other post. Which rcin is the throttle in the log and are the motor outputs logged? I would like to see where the radio throttle stick was before the crash. Thanks again for your help. On another note, two motors have bad bearings, one of them too severe to fly. Never noticed the severe one until after the flip. As far as I can tell, the motors are t motor MN-2212. Does anyone know if the motor leads are soldered to the esc?
Let me see if I can get this right.
The copter was facing East and when you released the throttle the GPS told the copter it had moved 15 feet to the Left and 10 feet back. This caused the copter to compensate by flying South East flipping it over on the front right motor.
Motor 2 went hot first followed by 4 and then 3 for the final flip.
[attachment=0]MotorOut.png[/attachment]
In version 3.2 of the Firmware landing detection takes longer to be detected which did not help your cause.
Even though you may be 50’ from a building the satellite may be at an angle going through a part of the building or tree which causes the distortion. Not all visible satellites are directly over head.
Mike
iseries,
Thanks for your time and help, I will definitely use Alt. for landing from now on. Now to find bearings.
Mike, any chance you can post a quick summary of your diagnostic process for the rest of us to learn from? I’m comfortable downloading logs and charting params and this page in the wiki has given some guidance:
copter.ardupilot.com/wiki/downlo … n-planner/
…but I spent some time on this log and didn’t get close to your diagnosis which sounds spot on.
Thanks.
The key here is it happened to me.
I was flying my IRIS and decided to land it next to my house, about 20 feet from it. I hit the LAND switch and it started to land. I wasn’t watching it very closely as it was just going to land. When it got to about 1 meter from landing it took off right at me. I was shocked and did not react right away only to have it skid sideways into the lawn and flip over.
I immediately looked at the logs and right at the end of the logs as this was the problem area. I found everything normal and 12 satellites and an HDOP of 1.7. I knew something had happened so I looked on.
I then clicked on the Show Map and found that I can click on the trace plot and it would point to a spot on the graph. Using this I found that just as it was about to land the GPS trace went 20 feet into my house.
That was it, because I knew that the copter came straight down and flew in the opposite direction.
Good think as someone else had this happen and the plot went in the opposite direction smashing his copter into the cement building.
The other day I was doing some testing on my copter and found that it got a GPS fix from inside my house. I thought that was pretty good and looked at in Mission Planner only to see that it positioned my copter 150 feet to the East of my house. Not good. Flying in open spaces good, flying near obstructions not so much.
Also I find it helpful sometimes to truncate the beginning of the logs so you can just see the problem area. I know I can zoom in on a section of the graph but sometimes its helpful to remove the noise so that it just plots what’s interesting.
I should write some code that will cut out a section of the log based on the time index. That could come in handy when checking out logs.
Mike
Interesting, thanks Mike.