The Internet of Things (IoT) is a fast expanding universe of smart machines interacting and communicating with each other, environments, and infrastructures. Along with artificial intelligence (AI) and self-driving vehicles, IoT tops the lists of the currently most disruptive technologies.
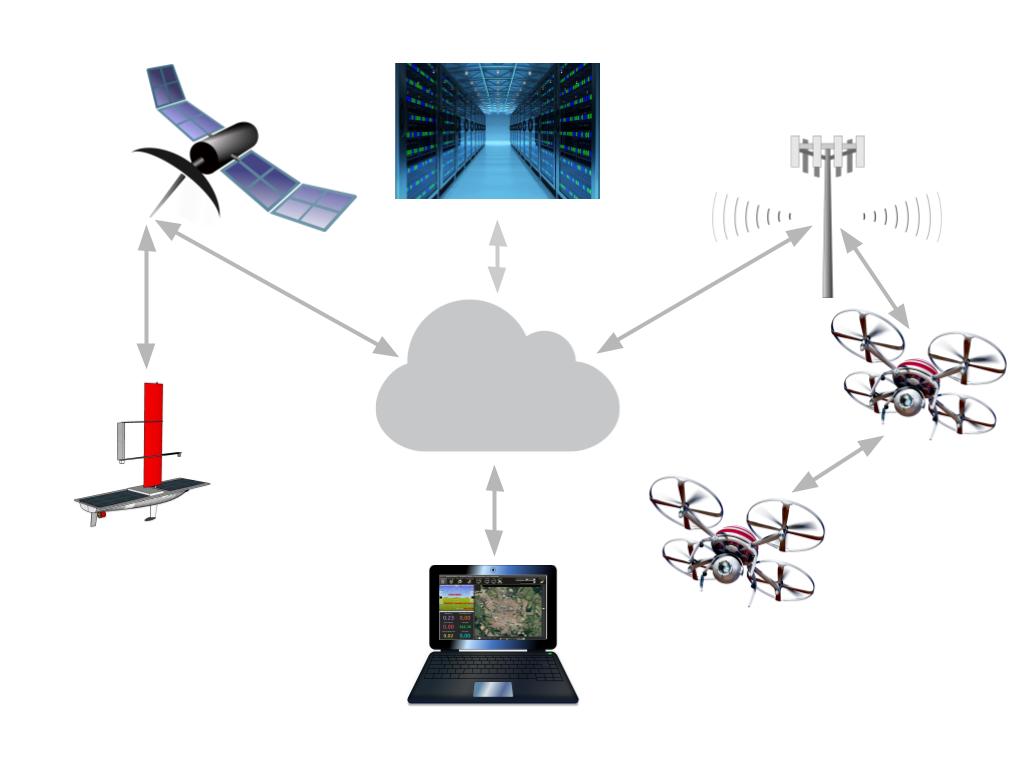
Connected vehicles is a branch of IoT that deals with wireless connectivity among vehicles (referred to as vehicle-to-vehicle or V2V communications) and between the vehicles and the surrounding infrastructure (vehicle-to-infrastructure or V2I communications).
The marine and aviation industries were the pioneers in developing connected vehicles. Automatic Identification Systems (AIS) used on ships and Automatic Dependent Surveillance – Broadcast (ADS–B) used on aircrafts are surveillance technologies that determine the position of ships and aircrafts via satellite navigation and periodically broadcasts the position information, allowing the vehicles to be tracked. Connected cars are following this technology.
In fact, many of the technologies designed for manned vehicles are also relevant to unmanned vehicles, like drones, where the humans are not physically present in the vehicle, instead operating outside the vehicles. This also applies to autonomous vehicles, where the vehicle operators are machines and programs rather than humans.
V2V and V2I communications applications include collision avoidance; track, command, control, and route (TCC&R) solutions; and data transfer, such as real-time environmental and diagnostic data collection and vehicle firmware updates. V2V and V2I communications are essential for autonomous vehicles, which require the vehicles to have a high level of situational awareness and “environmental intelligence”.
Outside of a few exclusive tech clubs, like NASA, connected unmanned vehicle technology is still in its infancy. Research and development in this area, such as NASA’s Unmanned Aerial System Traffic Management (UTM), for the most part address the need for coordinating unmanned aerial vehicles’ access to controlled airspace, a.k.a. “Internet of Drones” (IoD). “The Digital Ocean” by Liquid Robotics is an inspiring vision of marine IoT.
The most straightforward way to connect a vehicle to the Internet is to connect the autopilot program to a smartphone that essentially acts as a proxy server (or provides some additional functionality, such as data logging). In this case, the vehicle becomes a web server, and the clients, such as ground control stations, connect to that server. This method is useful when constantly streaming data from the vehicle to the infrastructure is not possible or practical. It allows the clients to selectively retrieve data from the vehicle when the connections are available. However, making such connections secure and reliable is challenging.
Another way to connect one or more vehicles to the Internet is to connect them to a router using radio telemetry links or a wireless local area network (WLAN), and connect that router to the Internet. This method can be useful when operational constraints or security requirements limit or restrict vehicles from directly accessing the Internet. This option, however, is not applicable to beyond line-of-sight V2I communications that require satellite, cellular, or other Internet-based communication services.
Typically, IoT connections to infrastructure involve a broker. The broker is an Internet server that authenticates and accepts connections from the Internet-connected devices and applications and exchanges messages between them. IoT is primarily built on MQTT, HTTP(S), and WebSocket message-oriented application level protocols that come with tried and true solutions to security, quality of service, etc.
An open and formalized communication protocol is critical for a healthy IoT ecosystem. The MAVLink protocol used by the ArduPilot/PX4 ecosystem is well documented and supported. MAVLink supports multiple vehicle types, such as aerial vehicles, rovers, boats, and submarines, which allows reuse of the same communication solutions in very diverse applications.
SPL is the first V2I system to provide a global satellite telemetry solution for unmanned vehicles controlled by ArduPilot. The SPL software suite includes a companion computer (called the SPL Radio Room) and three web services:
- SPL Ground Control - a smart proxy between vehicles, ground control stations, and Rock7Core web services;
- SPL Streams - service used for storing data reported by the vehicles; and
- SPL Tracks - service that provides access to the stored tracking data.
SPL supports only satellite communications over Iridium Short Burst Data (ISBD) provided by Rock7 Mobile. An instance of SPL Ground Control is required for each controlled vehicle. To keep communications secure, network-level security is required for securing TCP/IP socket communication between vehicles and GCSs.
Recently, Envirover has started to work on a hosted multi-tenant V2I hub for unmanned autonomous vehicles.
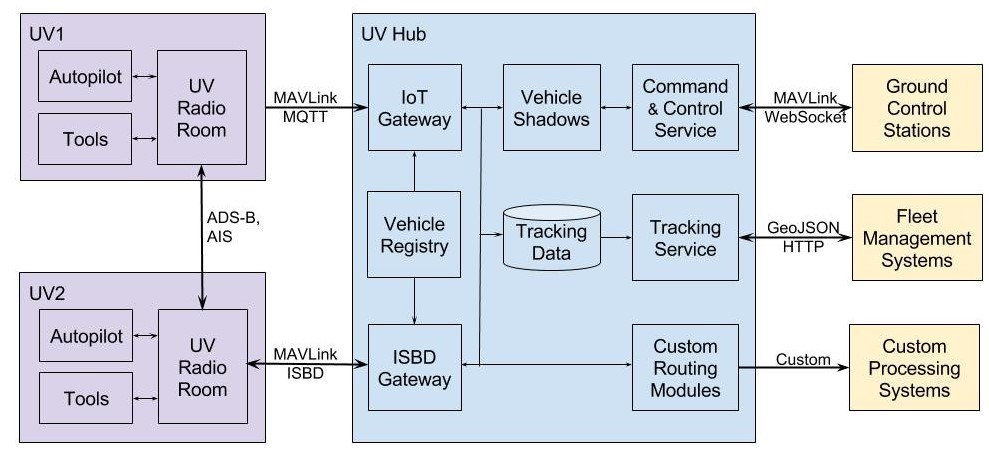
UV Hub provides a communication platform for unmanned vehicles (UVs) and applications, such as ground control stations (GCSs), tracking and fleet management systems, and custom data processing and control systems. For each registered vehicle UV Hub provides endpoints for tracking, command, control, and other application web services.
V2I connectivity can be intermittent, unreliable, and limited in speed and scale. Vehicle shadows keep the reported and desired states of the vehicles, allowing for asynchronous communication between vehicles and applications.
UV Radio Room is a companion computer for autopilot that provides V2I communication over wireless internet connections or satellite communication services (ISBD) and that could be integrated with ADS-B or AIS transceivers for V2V communications. UV Radio Room might also provide a communication platform for on-board tools, such as actuators and environmental sensors.
Coordination with ArduPilot/PX4 development is required for effective implementation of UV Radio Room and UV Hub. In particular, autopilots will need better support of high latency communications, and GCSs will need to support MAVLink over WebSocket Secure (WSS) protocol.
V2V and V2I connectivity provide a foundation for the technology behind intelligent unmanned vehicles. Access to online services enables intelligence that would be impossible to achieve offline. UV Hub will provide a secure, reliable, and flexible communication solution for many different types of unmanned vehicles.