I’m really looking forward to this. The smaller we can get the sensors, the smaller we can make the drones while still maintaining the same features… and small is safer and you can carry more of them!
@mboland - Keep an eye on our web store for further information. I’ll keep updating the specs here and the price is similar to our other products.
@fnoop - the range depends on the speed and environmental conditions. On a white wall or green tree it can reach 100m in bright sunlight. At high speed on a scanner the range will be reduced. More information on the interfaces to follow. Water tests still need to be done.
We will be offering both the closed LW20 and the open frame SF20. Below is the LW20 attached to a servo to make a low cost scanning LiDAR. The servo driver is built into the LW20 so no additional electronics are needed. Any digital servo can be used - the specs are fed into the LW20 so that it knows what resolution and scanning angles to expect for a given PWM pulse width. Servo gear backlash, scanning lag and other limitations of low cost servos are corrected internally to give the best angular accuracy. Data can be streamed live and alarms zones can be set:
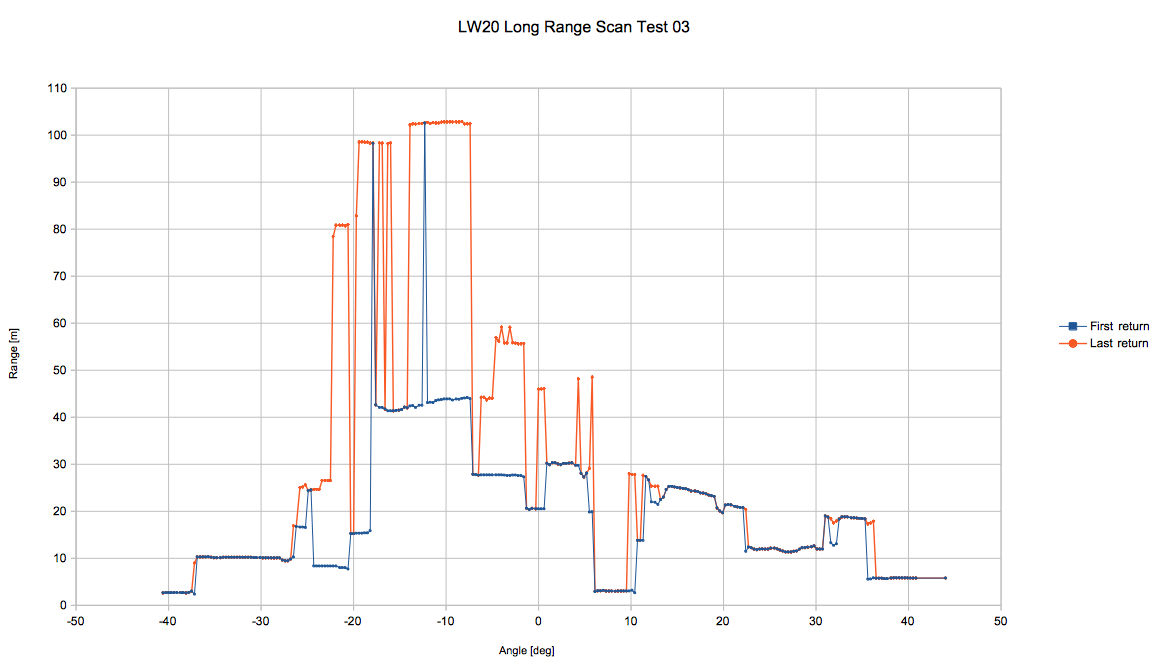
Here’s a sample scan done outdoors at low speed showing the first and last signals detected. The area mapped includes buildings, trees, long grass, posts and cars. It is mainly the long grass and trees that cause the big separation between the first and last signals since the LW20 was aiming at a shallow angle to the ground. The angular resolution is set to 0.3 deg and the range resolution is set to 1cm:
@Emin_Bu - Yes, the servo can be controlled to point the laser in the direction of flight but you have to tell the LW20 which way to aim using data from the flight controller. This is similar to steerable headlights that you get on many cars these days.
There are cheap servos and expensive servos, with Dynamixel falling squarely into the second category. While the specifications of the Dynamixel servos look very good, the real question is, how well will the servo will perform as a component in a LiDAR? Both the cheap and expensive servos have limitations and I will be presenting a lot more information about this in the future.
The LW20 with an inexpensive servo will make a high performance, light weight sensor for obstacle detection and collision avoidance. How far we can push the technology in the future remains to be seen ;).
Have you got any details on the ports and power. For example what supply voltage and i2C pullup voltage. What UART signal voltage. What supply current?