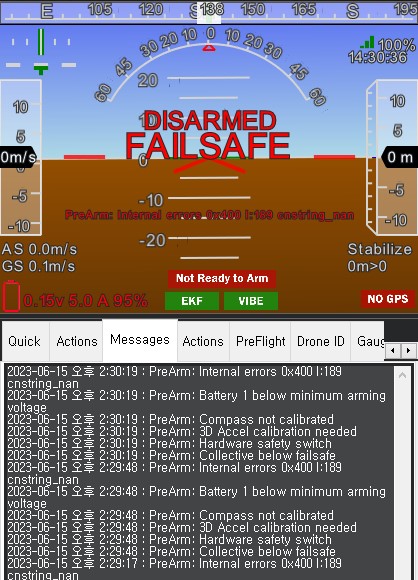
Connecting an arc flow to a pixhawk results in an internal error 0x400 l:189.
It works fine when connecting to PX4, it’s only when connecting to ArduPilot that the problem occurs.
Pixhawk receives rangefinder and opt_x,y values fine, but receives NaN for opt_m_x,y values.
If anyone has any thoughts on this case, I would appreciate it.
Thanks.