I had a successful test flight today with ArduPlane 3.7 with four waypoints and a rally point in the middle.
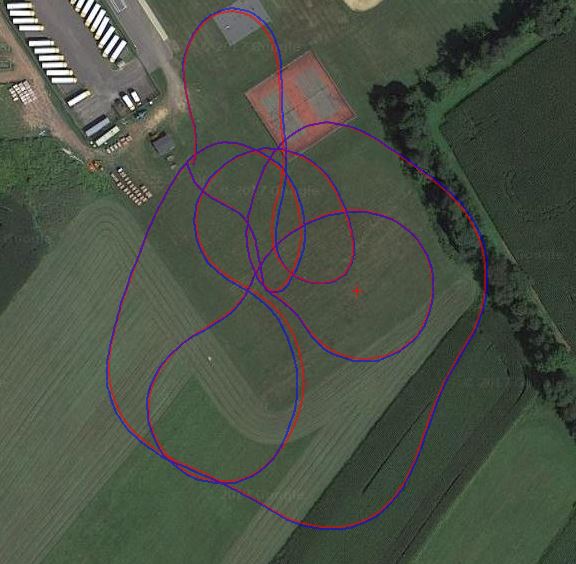
After the last waypoint it went towards the Rally Point and proceeded to fly a cloverleaf eight pattern with the Rally Point at the intersection of the three loops.
Can this be explained by problems with compass and or GPS?
After an earlier flight where the plane was flying wide of the waypoints, I increased the waypoint radius from the default of two meters to seven meters. It flew closer to the waypoints after the increase to seven meters but I then discovered the cloverleaf around the rally point.
I had also earlier increased the loiter radius from 15 to 17 meters when I felt that the plane was making too tight of a circle and banking too hard while loitering at the RTL position.
I suppose it cannot hurt to try 10 meters for the waypoint radius and 20 meters for the loiter radius next and see if that changes the behavior around the rally point.
I’ve sorted it. In general I was trying to make an airplane follow the same kinds of navigation that a quadcopter can. Airplanes needs more space though to maneuver.