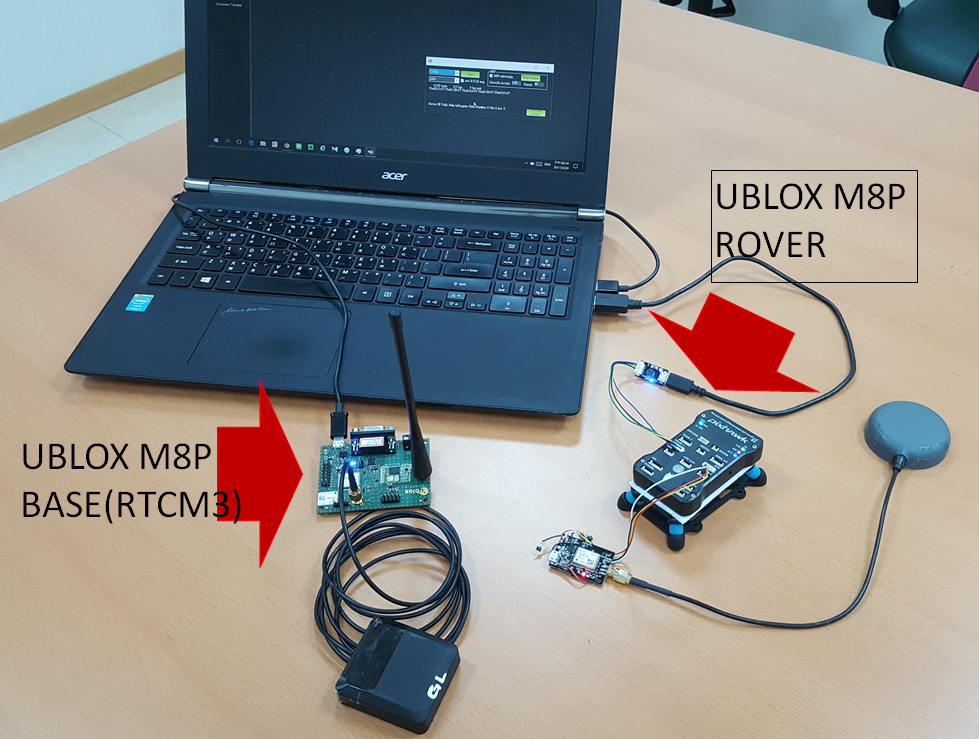
this is what i’m trying, using two m8p module, as image(1)
PX4 connect to Mission Planner via FTDI( ttl to usb), this for gps inject testing only, to avoid data throughput issue
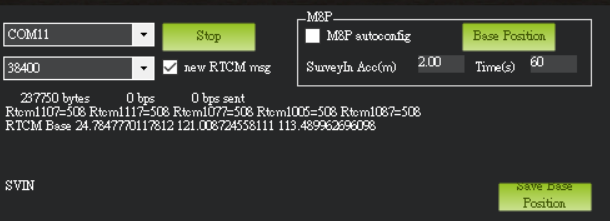
it’s seem mission planner can receiver rtcm3 from base m8p(1005, 1077, 1087…), (as image)
also i have follow the instruction to setup the PX4(gps_inject: send to all)(gps type as ublox)
during the connection, it’s looked nothing happen on Rover M8P, there is no data be sent from tx of gps port
mission planner version: 1.3.44
ArduCopter version: 3.4.5
please help, thanks