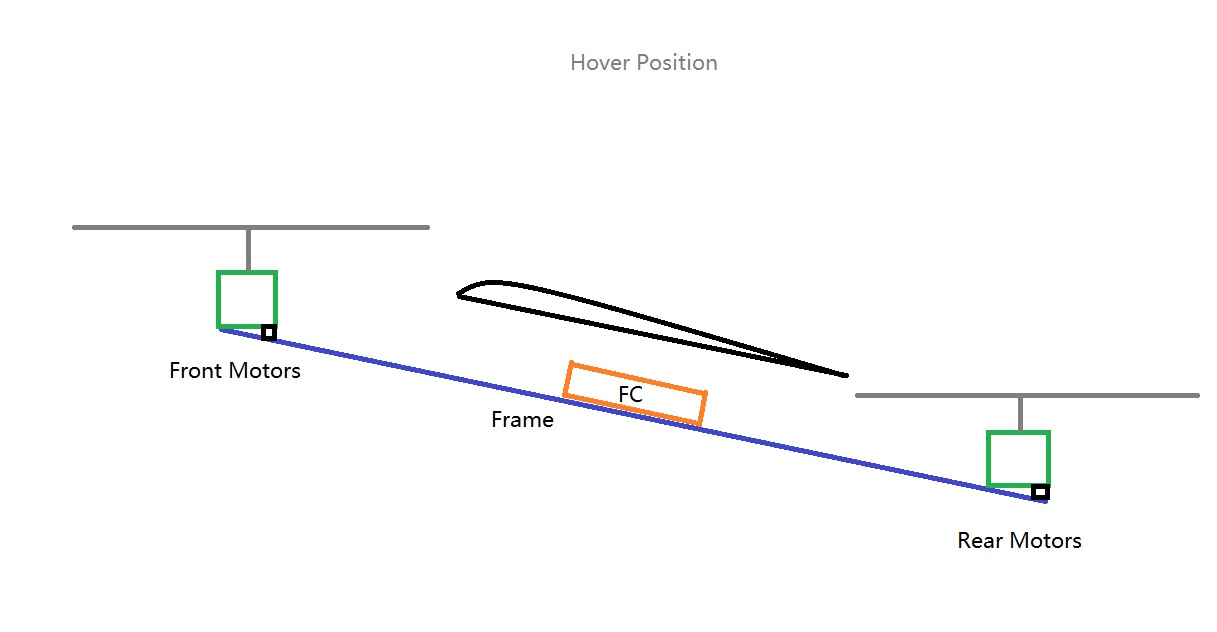
I’m considering to angle my motors slightly forward (5-10degrees) to get the airframe Hover/Loiter at that angle. Target is to get more lift during VTOL transitions.
Question: will the FC (Cube Black) be OK with hovering at an angle? I guess no problem in position hold, the FC would just do what is necessary to keep the copter where it is, same as in wind.
But what about altitude hold/stabilize odes? Will the copter drift away?
When I calibrate the gyros, should I calibrate the motors being vertical or the FC z-axis being vertical?
Q_TRIM_PITCH: Quadplane AHRS trim pitch
This sets the compensation for the pitch angle trim difference between forward and vertical flight pitch, NOTE! this is relative to forward flight trim mounting locaiton. For tailsitters this is relative to a baseline of 90 degrees.
-10 to +10
So in my case forward pitch is level, vertical flight pitch is angled upwards, means the angle is positive (+10) i guess.
In the parameter list it says degrees. I guess one of both is outdated?
Question for the level/horizon calibration:
I would make my landing gear so that the quad motors are vertical at start (vertical quad position), which means that the plane is not level.
So I have to calibrate the IMU level in level plane position, because this is the base-orientation, correct?