Hello, everyone!
To make a long story short, I’ve been slowly assembling this GPS unit together for a rover, and I can’t get the ROVER’s driver installed! I’ve downloaded MissionPlanner & UConnect, and the necessary REF & Rover firmware.
Base: UBX_M8_305_HPG_143_REFERENCE.4afe47902b3d8068a4fedccd45b8e6be.bin
Rover: UBX_M8_305_HPG_143_ROVER.74d7454b395e2fdf680d864f40b9dbed.bin
My Setup…
FCU: CubePilot - Orange Cube+, v4.2.3
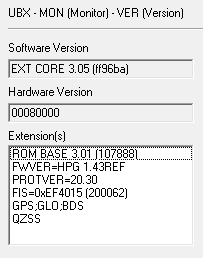
Base: Here+ RTK, FWVR=HPG 1.43REF (confirmed with UConnect 23.08)
Rover: Here3+, No driver has been loaded to puck
(Pic1)
Here+ RTK Base Firmware was a breeze (after finding it) through UConnect…
(Pic2)
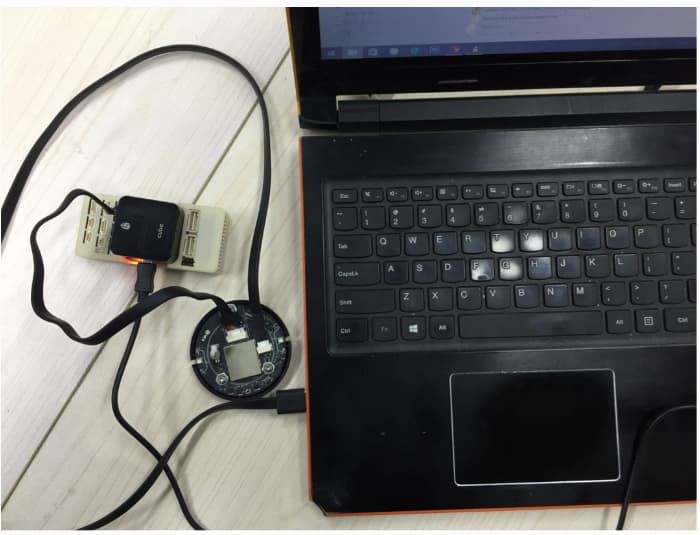
For the Here3+ I opened the puck but the USB link ports on the board are not the same as the version pictured in the manual…( Here+ RTK GPS — Copter documentation " Connect your HERE+ Base and Rover to Computer") (Pic3)
In other forums, people have successfully used MissionPlanner to upgrade/upload, but the “MENU” button’s functions do not work… ie I hit “MENU>>Update” and nothing happens.
Its also worth noting that everything about the puck is blank onscreen…
- Select Setup >> Optional Hardware >> DroneCAN/UAVCAN
- Push the MAVLink-CAN1 button (my GPS is connected to the CAN1 port with CAN2 currently open)
They say… but this isn’t working…
- Look for, “com.hex.here” and push the “Menu” button on the right side
- Menu >> Update
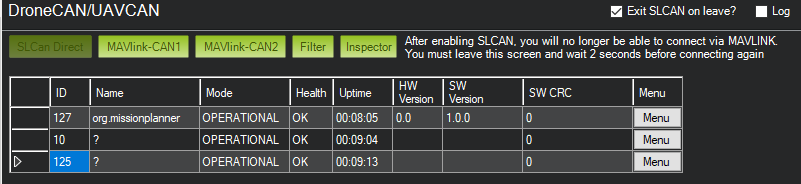
But the Here3+ in CAN1 has No information to update… (Pic4)
TIA