Hello,
I’m trying to install SITL on Raspberry pi 4 model b , os: raspbian buster.
I follow the procedure from : Setting up the Build Environment (Linux/Ubuntu)
(It worked fine on raspberry pi 3 and on ubuntu virtual machine…)
when I get to run: Tools/environment_install/install-prereqs-ubuntu.sh -y the script fails.
Any Idea?
Can you share the link for installing SITL on Raspberry Pi 3
thanks in advance
If you don’t want to compile your own code, you can download prebuilt arm firmware here.
1 Like
Is this file a Raspbian pi image which I flash directly to Pi using a flashing image software
Also, download this to the same directory.
Then run:
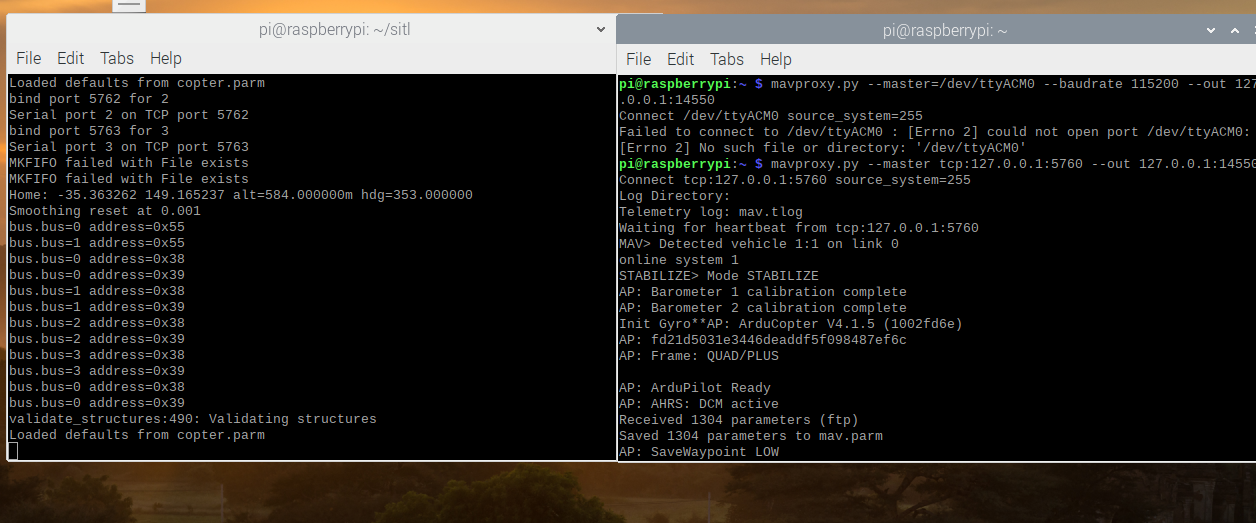
./arducopter -S --model + --speedup 1 --defaults copter.parm -I0
After this, you can connect to your simulated vehicle at port 5760 as TCP.
If you want a UDP connection, run below on a separate terminal.
mavproxy.py --master tcp:127.0.0.1:5760 --out 127.0.0.1:14550
Now you can connect to your simulated vehicle at port 14550 as a UDP connection.
For convenience, you can create a shell script to do this automatically.
#!/bin/bash
screen -S vehicle -d -m bash -c "./arducopter -S --model + --speedup 1 --defaults copter.parm -I0"
screen -S proxy -d -m bash -c "mavproxy.py --master tcp:127.0.0.1:5760 --out 127.0.0.1:14550"
If you want to stop it:
screen -S vehicle -X quit
screen -S proxy -X quit
Or just:
killall screen
1 Like
Is the first file that you provided, a Raspbian pi image which i require to flash using the etcher image software to a new raspi sd card
No, it is the compiled executable, arducopter sitl binary.
1 Like
Where do I place this file on the RasPi
It doesn’t matter, place it as you wish ![]()
1 Like
How can I start SITL from Windows …for example , if I want to send some Mavlink commands to my RasPi…
Can I use Mission Planner on Windows to access my SITL on RasPi
That’s out of the scope of this topic.
Exactly what do you want to accomplish?
Of course, you can.
Change this line:
to:
mavproxy.py --master tcp:127.0.0.1:5760 --out WIN10_IP_ADDRESS:14550
Mission Planner probably automatically connects to the vehicle since the port is the magical 14550 but if it is not select connection as UDP and port 14550 and hit connect.
1 Like
Is there any Patreon website where I can contribute to your replies here … ![]()
1 Like
I was able to do exactly as you told. Now I want to try mission planner thro’ windows to connect to SITL in Raspberry Pi …It is not connecting…Any suggestions …
I actually explained in here
Hi,
Do you have more information about the following statement
./arducopter -S --model + --speedup 1 --defaults copter.parm -I0
Also where can I find document to understand what is written in Copter.param file . I wanted to add more parameters if possible. Are these Mavlink messages .
Why is the exclaimatory mark ( " ! " ) placed inside this file ?
thank you in advance
./arducopter --help
https://ardupilot.org/copter/docs/parameters.html
No, they are parameters.
I don’t know but # is for commenting out that line.
1 Like
I was able to successfully link my Raspberry Pi 3A+ to my Windows 10 laptop. It works through WiFi using UDP port straight out of the box !! However when I start flying missions, the first error I get is re-requesting way point [1,2], I have already set 5 way points in the flight plan menu .
I think you can ignore it if everything works fine.