In the wiki for initial PID setup there is reference to specific pid setups for copter 4.1 and 4.2.
Setting up a new copter with 4.3 - how should I set these:
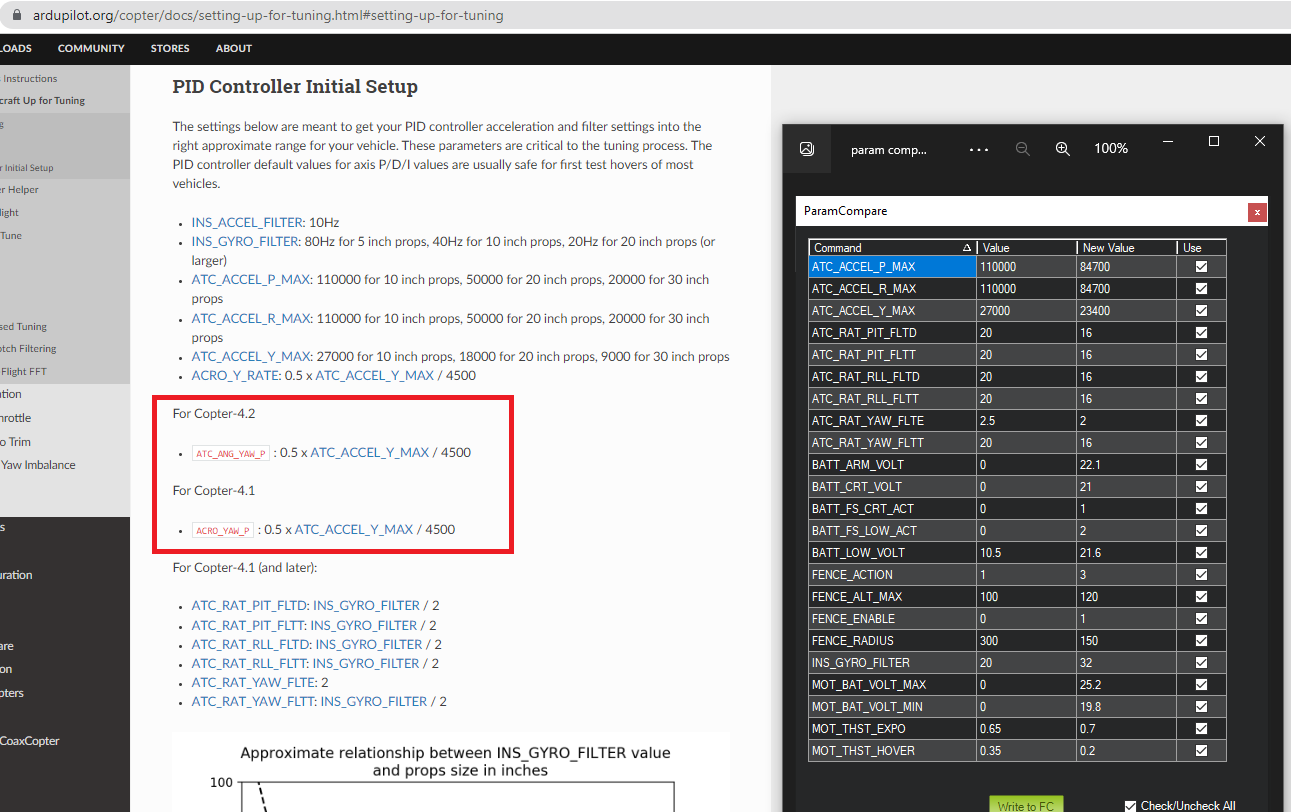
Notice that these are not among the automated PID setup parameters.
In the wiki for initial PID setup there is reference to specific pid setups for copter 4.1 and 4.2.
Setting up a new copter with 4.3 - how should I set these:
Notice that these are not among the automated PID setup parameters.
ACRO_YAW_P is gone so no consideration there. IMO you can leave the ATC_ANGLE_X_P values at default assuming you are configuring to run Auto Tune. In practice they may be close to what that calculation produces but that depends on several factors. If Manual Tuning you would put those on an in-flight tuning pot as part of the iterative process.
I’m not sure why 4.1 and 4.2 is mentioned for ACCELs since there’s no difference even going back several versions.
3.6 → 4.0 some params names changed
EDIT - was reading it on my phone earlier, couldnt read the pic properly
The ATC_ANG_YAW_P, whatever it’s called in different versions, should be adjusted as per the formula.
4.1 → 4.2 is just when it changed names. The formula still applies to 4.3 (4.2 and later)
Thanks @dkemxr
I guess if we take the language in the wiki literally, the formula for ATC_ANG_YAW_P only applies to Copter 4.2 - and and since I’m running Copter 4.3, I should leave this parameter alone as you suggest.
And as you say - Auto Tune addresses these parameters.
Thanks Dave
Thanks @xfacta
As I read it, “ACCELs” are inputs to the formulas noted for 4.1 and 4.2.
There’s no direction to sent any “ACCELs” parameters specific to 4.1 or 4.2.
The wiki does direct to set three “ACCELs” parameters for all versions.
Am I looking at this the right way?
Thanks Shawn
Yes you calculate the accels then calculate the ATC_ANG_YAW_P (and other things)
It’s the same parameter (same function) as in earlier AC version, it just changed the name in 4.3 to be grouped with other parameters of similar functions.
So you still DEFINITELY calculate ATC_ANG_YAW_P the same way you did for ACRO_YAW_P
My spreadsheet does it all for you. I’m updating it now for the new param name and some other stuff, I’ll post the link here.
And the Initial Parameters in MissionPlanner is based on the spreadsheet. It just needs an update for the new param name. I’ll work on that, or more correctly, ask someone else to work on that ![]()
Check it out and see if you can spot errors or something that needs changing. Most of it has been in place quite some time and well tested.