Hi there,
I’m trying to setup my quad, since i’m inside my house with no gps reception, what are the reccomended settings i should srt in order to be able to arm the quad?
Thank you
Hi there,
I’m trying to setup my quad, since i’m inside my house with no gps reception, what are the reccomended settings i should srt in order to be able to arm the quad?
Thank you
Depending on what hardware you are using, it is can be simple or a bit more complicated. First ensure you have wired the vehicle correctly. In Mission Planner, upload the correct firmware** and set the appropriate frame class and type. Then run through the usual calibration procedure for radio, switches, accelerometer, compass, and ESCs. That should get you to the point where it is armable. Prior to flight, however, ensure you have set up failsafe and initial tuning is configured.
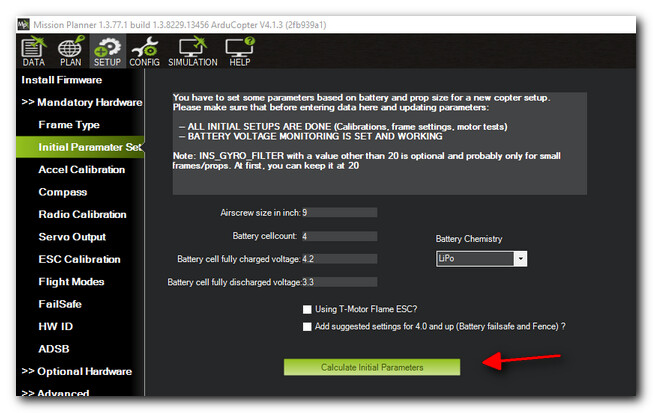
Recent MP versions have included a step for helping with initial parameter setup.
You might need to look at the ARMING_CHECK as well for your configuration.
Andy Piper created a video describing a more complicated process for an FPV quad build setup.
** It might be best to load, configure and test the flight control board prior to installation to ensure it is functional.
Use stabalize flight mode. And do the normal calibration procedure without skipping any step
Well, now it`s saying “bad battery” although the battery is charged and connected…
I am using Pixhawk 32 V5
Ardu 4.2.1
Did you correctly set up the battery voltage and current measurement?
Do the voltage reading match the voltage measured by a voltmeter? Does the current match the one from a amperimeter?
Hi,
When i`m connecting the external battery (2200 MAH), the PIX starts beeping, and i get the parameters:

You have not yet answered any of my direct questions.
Im not sure how to setup the battery voltage, Can you please explain or refer how to do it?
בתאריך יום ד׳, 20 ביולי 2022, 20:16, מאת Amilcar Lucas via ArduPilot Discourse <noreply@ardupilot.org>:
Well, It worked!!!
i did the manual calibration and now it`s working.
Thank you so much.
