I just doublechecked the video download: for me it works
after dealing with cookies you click on the icon in the middle of the page
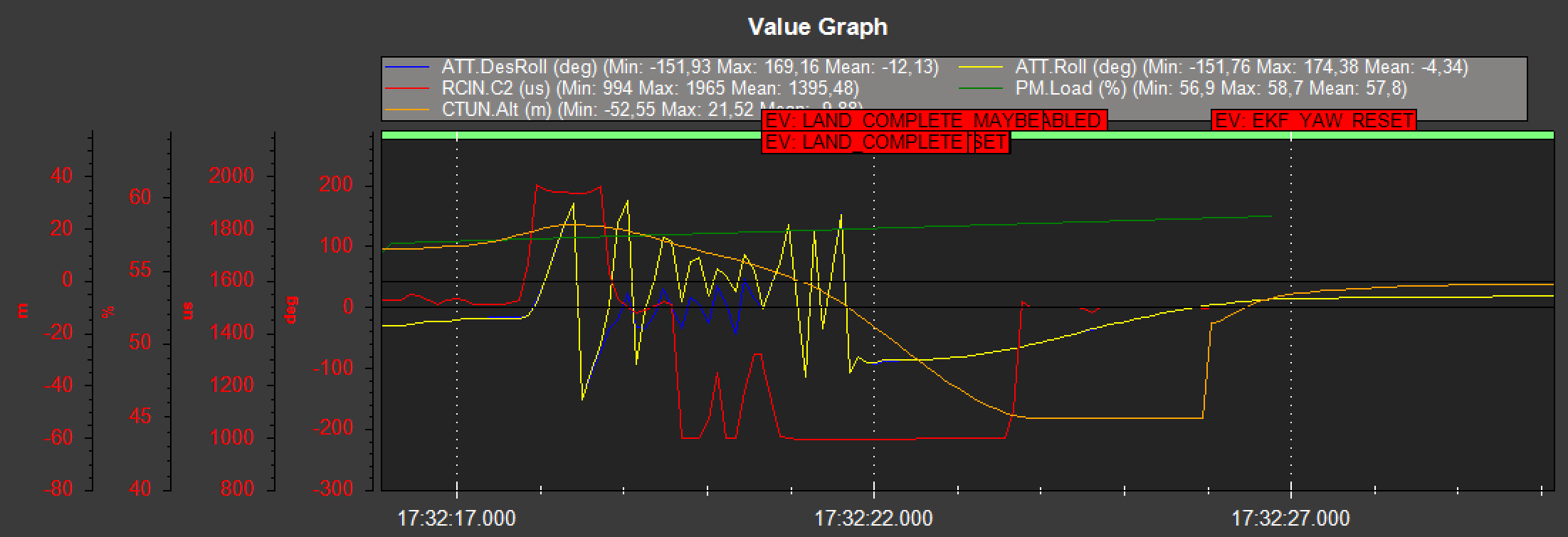
in addition the screenshot above shows Roll input “C2” which stops after 360° of rotation “ATT.Roll”. After a short moment I started countersteering because the quad didn’t stop to roll… until the ground stopped it
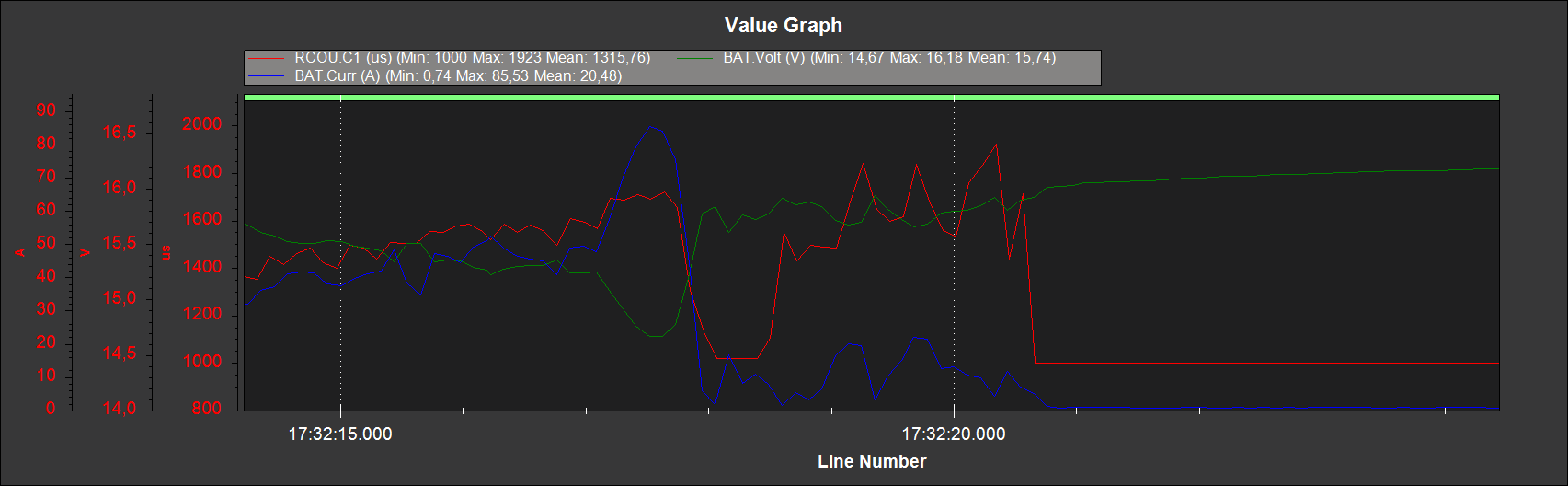
Hello! For me, it was a desync or failure in motor 1. You can see that the PWM of motor 1 was high whereas motor 2 were low to compensate, and in that moment the roll couldn’t follow the desired roll.
Furthermore, is weird that you had a current peak a few moments before, and after that, you current was very low and the voltage was relaxed altough motor 1 was almost at maximum. So maybe you had a electric failure related with cables, bad solder point…