i’m flying indoors and have a problem that the drone suddenly stops props and crashes.
From a research i’v done on Google, i found out that this might be caused by the barometer responding wrong to indoor barometric pressure.
But the problem is that i can’t find any software or hardware solution to this situation.
For example - i can’t find in Mission Planner any flight mode that disables the barometer operation and also can’t find in Mission Planner parameter tree, any option to disable barometer operation.
Could anyone please help me to solve this problem reliably?
Really? Stabilize doesn’t require the use of the barometer as far as I remember. Same with Acro, but you’re taking your vehicles life into your own hands as there is no gyro compensation for leveling in Acro. Stabilize is Acro with gyro stabilization to keep the craft level.
Also, stabilize you have to adjust throttle to keep hover. You can’t use a barometer-required flight mode and disable the barometer. There are tradeoffs.
As much as i understand (which is really not too much - newbie etc…) i was able to disable the gyro no matter what the flight mode is, using one of the parameter tree fields (can’t recall the field name). So i concluded, that if i can’t find a field that disables the barometer, no matter what flight mode, then it is not possible to disable the barometer at all.
Are you 100% sure that stabilize mode will disable barometer? Since i did spend several hours researching and going through flight modes characteristics, and can’t recall that it was said, that stabilize mode disables barometer.
Stabilize does not disable the Barometer. This flight mode does not use the Barometer for flight.
Still not getting the barometer issue. Unless the building is being pressurized and rises and falls often then there should be no issue. A flight log will tell us what the copter was doing and if pressure really did cause the crash.
2.Why does it take about an hour to download only a single flight log? i need to download the last 10 flight logs, since i don’t remember exactly which flight had the latest crash and at the current download rate that would require a lot of time… as much as i recall the download rate i’m getting from the PixFalcon to my computer via USB resembles download rates via USB 20 years ago…
Are you people sure from what can be seen on the log files, that this issue has nothing to do with the barometer and indoor flight and everything to do with too strong a vibrations?
I would also check your frame, as even solidly mounting the flight controller generally does not cause this much vibration.
If you need an analogy then think of driving your car fast down a heavily corrugated dirt road.
You will suddenly not have feel of the road and will get easily out of control.
Now you are feeding those vibrations to the controls of your copter.
So the procedure is:
reduce vibrations from mechanical sources, props, motors, frame, any vibrating parts.
Isolate flight controller from frame.
The very first thing I would look toward as a start would be balance your props. If that has no positive effect then start what @mboland has suggested. Also, wires on the FC itself can vibrate inducing the IMUs to read that. Isolation is key.
Another thing that got me at the apparent false conclusion, that the crashes happen because of the barometer, is the following phenomenon:
The FC (PixFalcon) is enclosed inside a sort of sealed box. Every time i want to start flying the drone, the FC will not give the ‘ready’ tone, before i open and close briefly the top enclosure and let what in? i thought it was air pressure…now i think it is light? are these FC’s also packed with light sensors? For what reason? Can anyone of you people help me resolve this issue?
It could be pressure, what is your environment like?
If you have a pressure difference in the sealed box that you equalise, that could cause a problem.
Its will depend on the time and place you power up and the time and place you try to arm.
Are they different?
Also remember the sensors have heaters (I am pretty sure the PixFalcon does) and that could cause issues in a sealed enclosure.
Keep air pressure in mind.
Also the PixFalcon can be a bit picky about it’s surroundings and can sometimes take a while to arm.
I have had to pick it up and move the copter about before getting the ready signal.
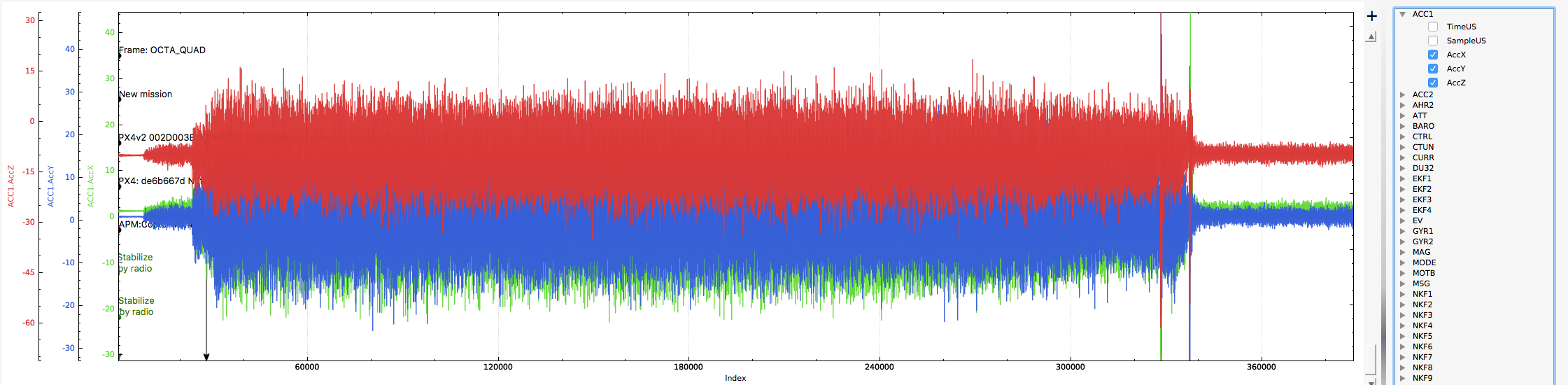
i tried to compare the previous flight logs, representing flight with no sponge-foam around FC and these latest logs and could find no observable difference, in the scale of numbers graphed for ‘ACC1’, ‘ACC2’ and ‘VIBRATIONS 3.3’ fields.
Can you see any change in the over-vibration problem in these new logs??
If you could neither find any change - is the science of even basic shock absorption so complicated?
What should i do now? Is the sponge-foam not as good as what was called here before ‘zeal gel’? Could the main problem be just unbalanced props and not frame induced vibration?
As i said earlier, the ball type shock mounts are only adequate in a rigid well balanced frame.
I personally don’t use them and prefer a full suspension method with the added mass of the lead as I described.
And yes, the science of shock absorption IS complex, especially if you are trying to mitigate the effects of a poor build.
Cheap props are the biggest culprit, then flexible arms, flexible centre plate, wires pulling or pushing on the flight controller, and so on.
Add mass to your flight controller and you will see a difference.
Hi @iseries, @BigTulsa, @mboland,
Maybe you can help me with my project - I also want to fly indoor but in Guided mode.
I connected a Vive tracker on the drone and I send a fake gps data to the arducopter with its exact position.
It seems that the arducopter (EKF) accepts the XY position but somehow it doesn’t like the altitude that I sent to it.
I want that the drone will ignore the barometer data and only rely on the gps data.
How can I do it?