Also, are they configured differently at firmware level? I have no experience with HERE GPS modules, but I think they use u-blox chips? There might be a bandwidth issue if it’s configured for multiple GNS systems and getting lots of connections.
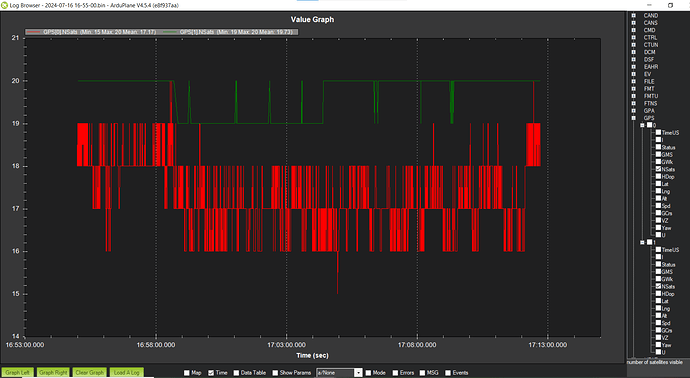
A serial bandwidth issue would cause sat count to occasionally drop completely and probably cause an unhealthy GPS warning. If sat count is reported, the UBX message containing it is making it through intact.
Still a good idea to check for consistent firmware and config.
Yes previously we had RFD antennas near the GPS, it’s now moved other side. But, still, we are facing the same issue.
We have kept the GPS module cable as it is, not modified or done anything to it, using the same JST-GH connector that comes with the module.
I’ve checked the Ardupilot messages and there are no “Unhealthy GPS” messages.
I’ll also check for the firmware and hardware versions and try to check with the different firmware versions.
Are both HERE3 new and out of the box, or did you purchase one or both of them used? Have you previously changed their firmware configuration via u-center? Also please compare their configuration in the DroneCAN/UAVCAN module in Mission Planner.