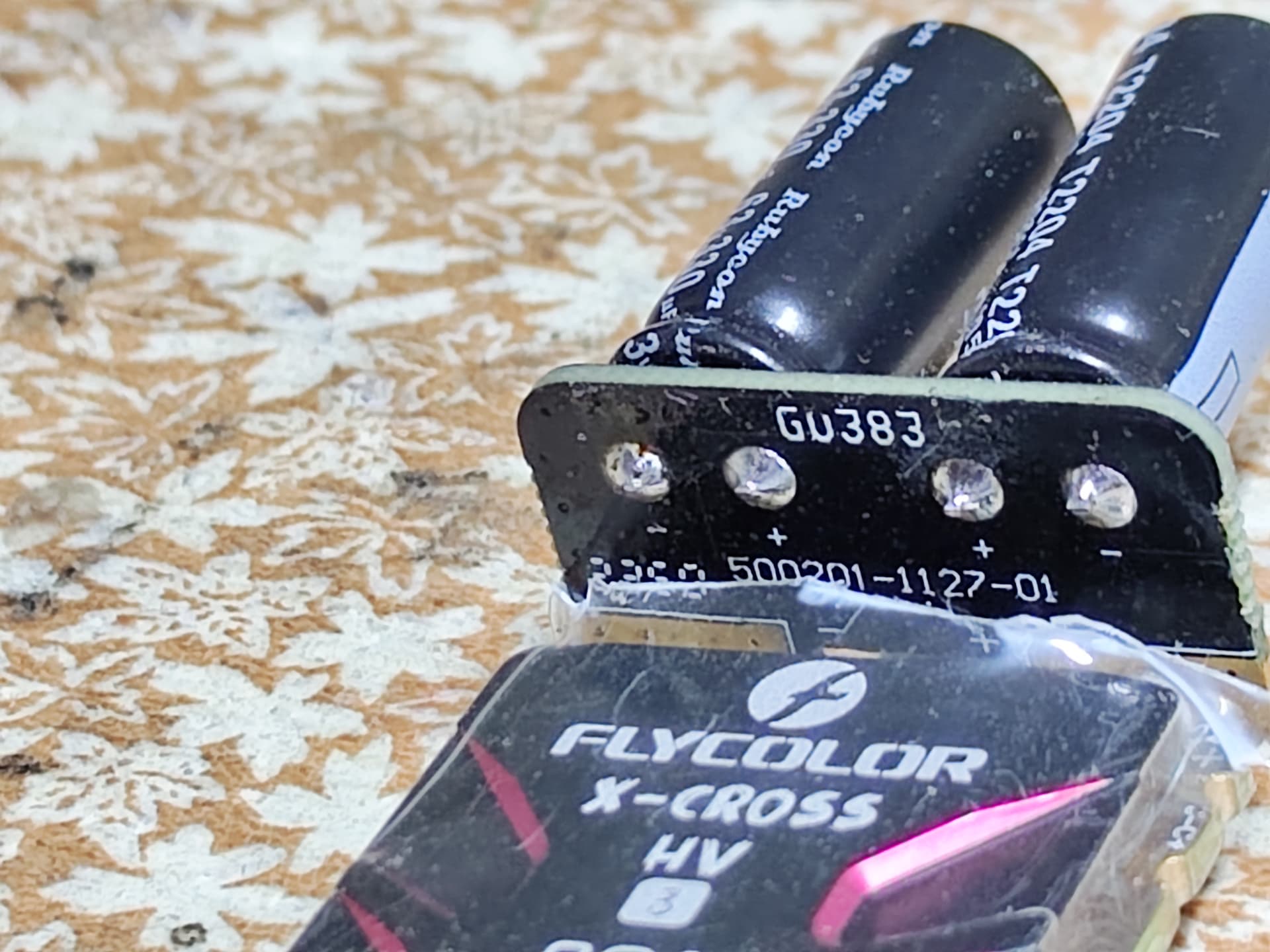
hello, please help me figure it out. I have 4 ESC controllers FLYCOLOR X-CROSS 80A HV3 for multirotor and motors Eagle EA5416 KV200 MOTOR with N’p characteristics; 18N/24P I have power from a 12S battery, when the gas rises to 70%, synchronization fails. I changed the timing from 1 to 24, Ramp-up Power from 40 to 100, PWM frequency changed “16kHz” to “By RPM.” tell me what needs to be done so that this regulator works normally, nothing helps. I have no way to replace 4 motors or 4 ESC.
I started it directly from the RC receiver, the same thing happens, as a result, one ESC burned out
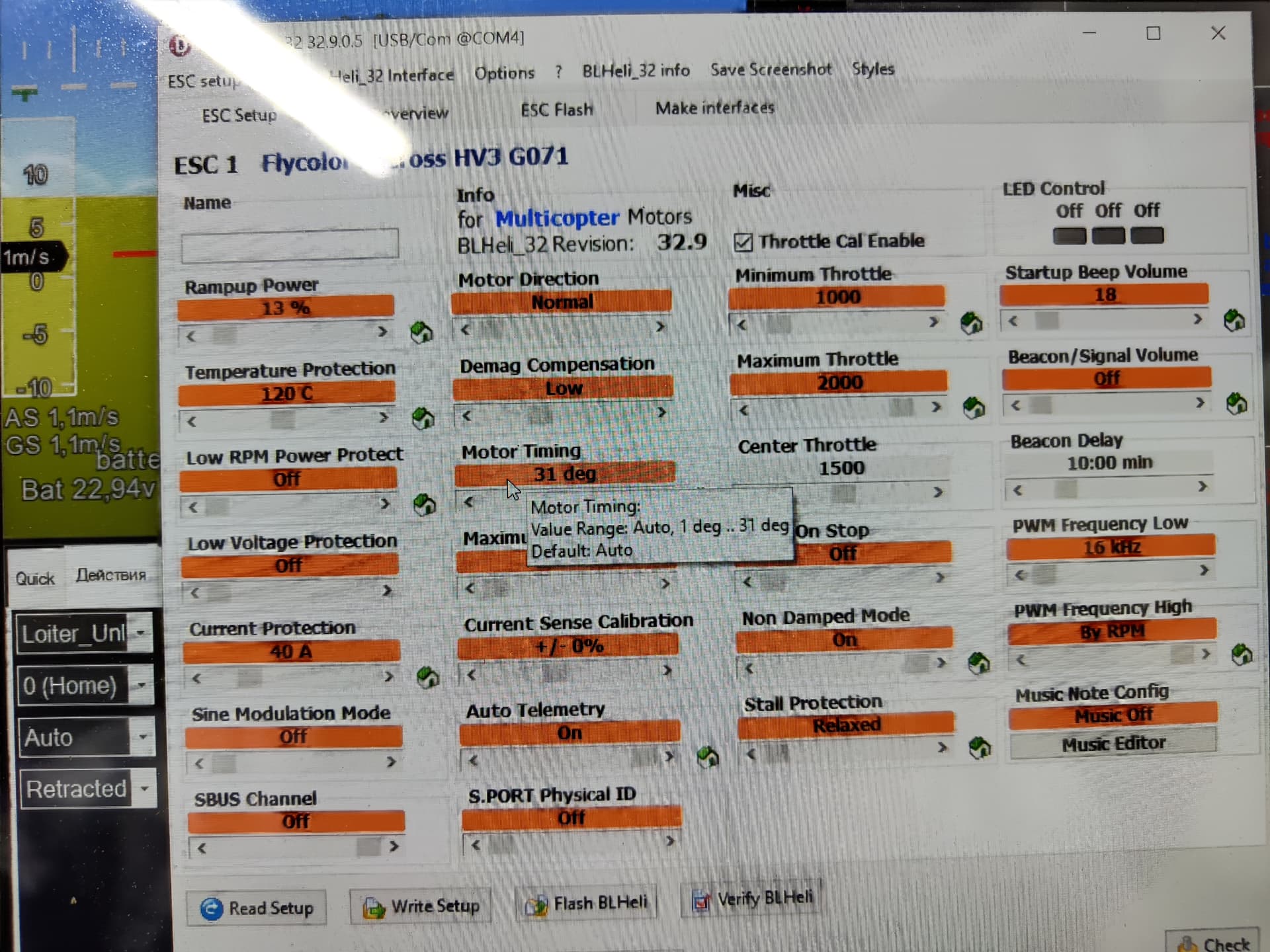
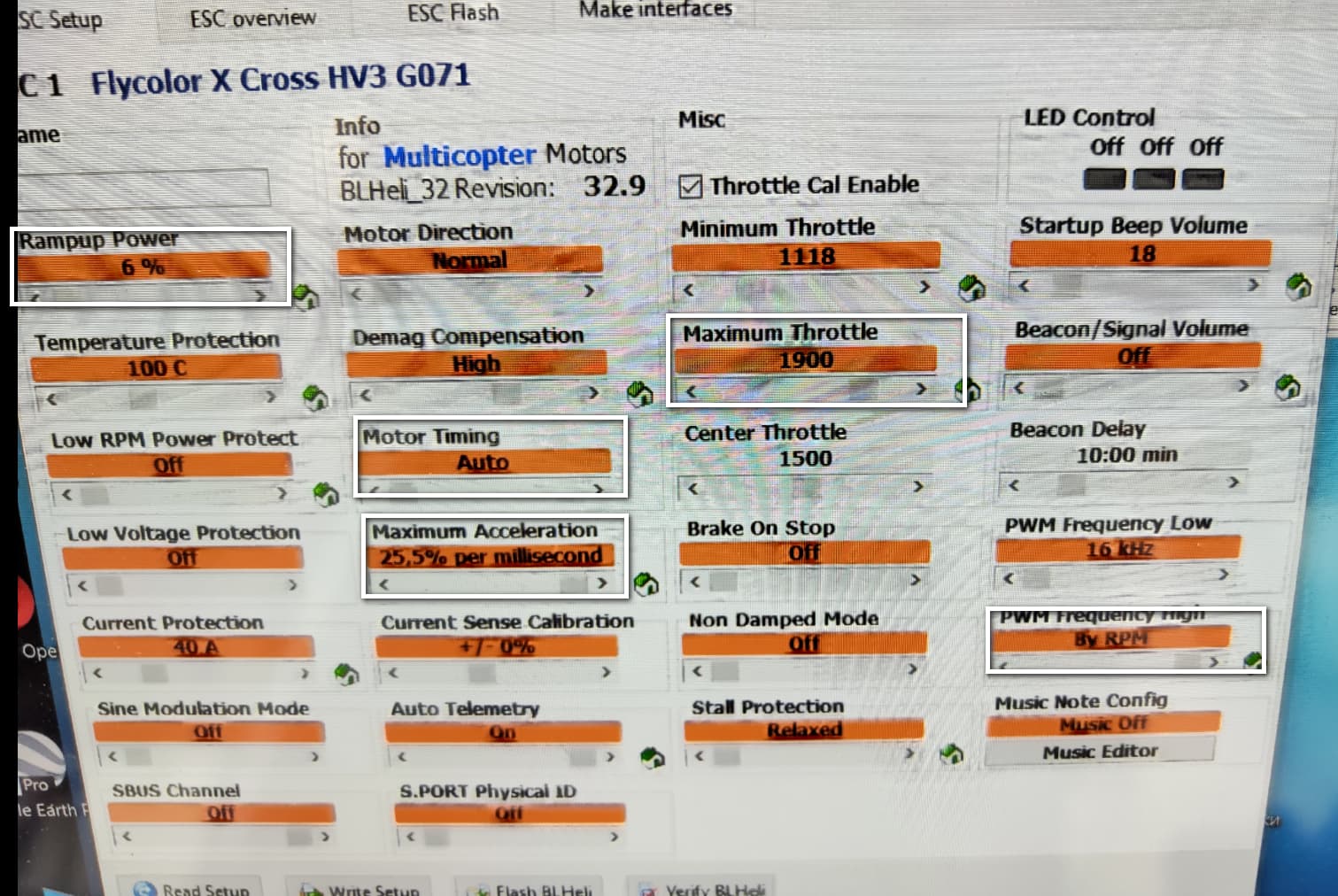
Have you got these BLHELI_32 settings in the ESCs:
Low RPM Power Protect = OFF
Low Voltage Protection = OFF (rely on the flight controller battery settings)
Temperature Protection = 90
Motor Timing = Auto
Some of those wont necessarily affect your problem, but are just my standard settings.
Try Ramp Up Power down to about 25% or 20% (instead of up higher). I think default was 50%.
You could also try lowering Maximum Acceleration. I would go very low and see if the issue still exists, then work upwards until the issue reappears, then go down a step.
Also I use the Sine Modulation too, not a lot of people do. I’ve never had a problem with it.
At the flight controller you should use DSHOT300 or DSHOT600 if you can. This will ensure the issue is not related to PWM and interference.
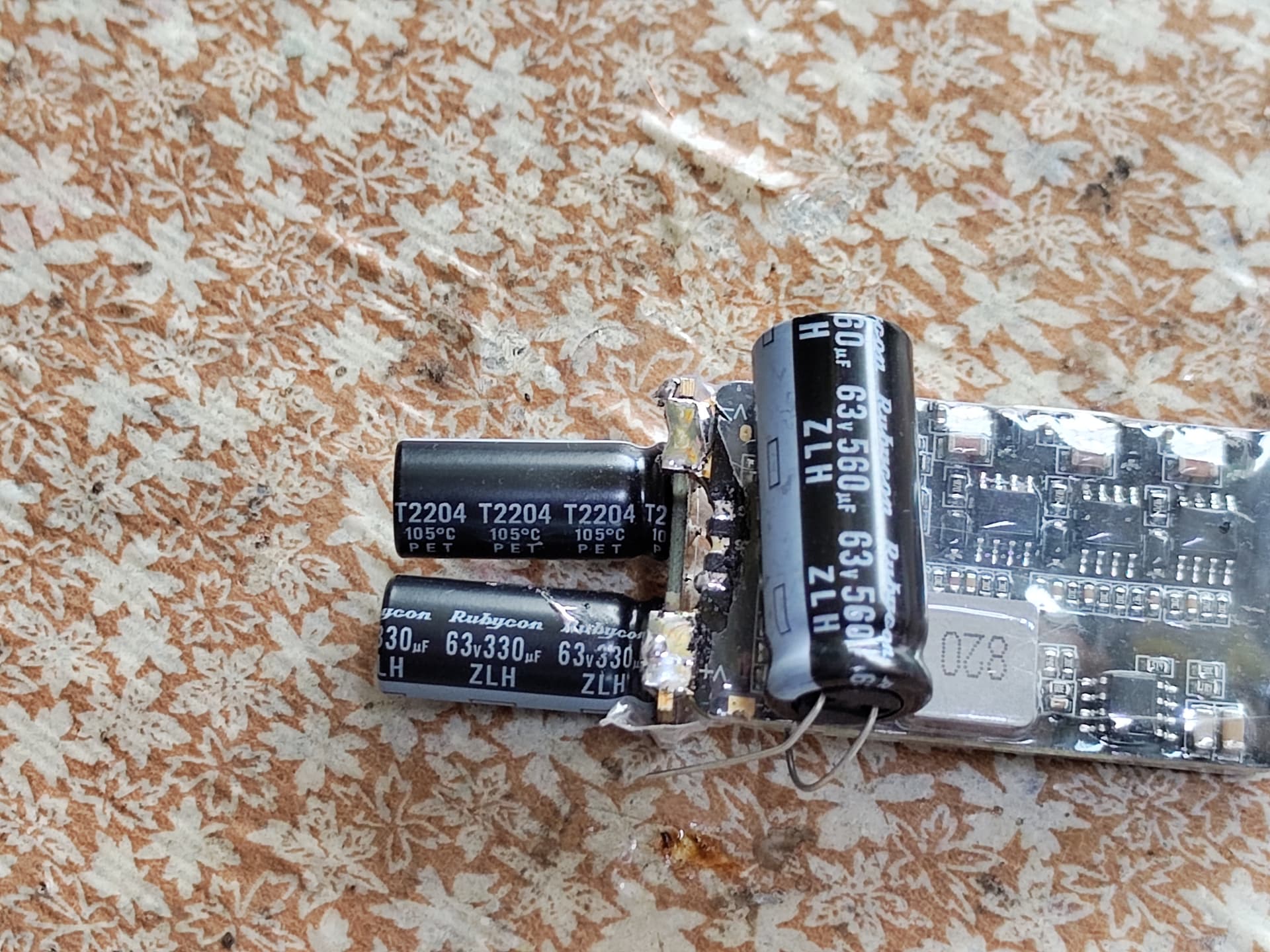
Have you got big Low ESR capacitors on the ESCs battery inputs? You’ll need at least 470u 63v, or two smaller value caps in parallel. They must be Low ESR!
What happens when you run the motor at 60% and then increase to 70% or 80% ?
Let us know what you find - this will be good information for everyone.
hello, thank you so much for your help. today there was time for the test set Low RPM Power Protect = OFF
Low Voltage Protection = OFF
Temperature Protection = 90
Motor Timing = Auto and here are the results; if you set the maximum Motor Timing, it works the same with the Motor Timing = Auto setting, but if you lower the Ramp Up Power to 13, these settings allow you to raise the gas to 95%, if I set the Ramp Up Power above, for example, 20, then the breakdown will already be 80% (left in the settings Motor Timing = Auto).
I also changed the settings of DSHOT300, DSHOT600 and even DSHOT1200, it didn’t change anything, I left DSHOT600. capacitors are included with ESC total capacity of 660 uf. Now I have reduced the SERVO output to 1950 in the settings and there is no breakdown.
Tell me how can low Ramp Up Power affect the quality of the flight?
The tests were carried out with a charge per cell of about 4 volts and a total voltage of 47 volts, you need to check with the battery as charged as possible. in the video, a 95 % gas breakdown
I think when you proceed to PID tuning the PIDs will factor in that low Ramp Up Power, whether by Autotune or manual tune. Investigate the VTOL Quicktune script - you will want to start with that.
I dont anticipate much of a noticeable effect from the lower Ramp Up Power. It does mean the change from a lower RPM to a higher RPM will be less aggressive, but there are plenty of ESCs out there that must adopt this approach by default - and BLHELI32 ESCs are probably much more aggressive than anything else to begin with.
Wait! I just notoced you have Non-Damped Mode ON - you definitely want that OFF , which is the default.
In non-damped mode some of the BLHELI32 features dont work, in fact things can get a bit strange.
I believe it is for use where back-EMF or regenerative braking is an issue, like robotic arms and actuators.
If the regenerative braking of those motors and props is an issue for those ESCs, then you will have to get better ESCs rather than disable that feature.
the capacitors are 2 next to each other, but there are still side contacts and another 570 uf capacitor is included. I will first turn on the Damped Mode and check how it works, then I will add another capacitor and check again, I will write about the results. If I understood correctly on your photo ESC APD 80
You capacitors will be OK like that. No need to add extra caps I think.
I just wanted to check because most you see mounted on a circuit board are often connected some distance from the ESC.
Yes, my screenshot was from testing an APD F80 some time ago. I didnt have any other photos or accessible ESCs to use for a photo.
I was away on business for a week and could not finish the job. I am very upset, I tried to adjust the regulator, but with a sharp gas, a breakdown occurs, I changed the “Non-Damped Mode” setting, but it does not give anything. I don’t know what to do anymore, a lot of money has been spent and time has been lost on this project, but I can’t launch it. Sadness
I added a 560 uf capacitor, the total capacity is 1000 uf, nothing has changed.
this regulator does not want to work normally from 12 s with this motor
You will just have to leave Ramp Up Power very low. I dont think it will affect flight much - you will need to test. Anyway, that’s what PID adjustments are for → making up for all the differences in motors, ESCs, batteries and so on.
I installed Ramp Up Power 5, there is a breakdown, if I put 3, then the motor does not unwind. These are the latest settings, he does not want to work normally.
I haven’t dealt with 12 S power before. what could be the problem with motors or regulators?
I think you could try the Maximum Acceleration slider, set it down to 10% or something.
And I think you can increase the Current Protection limit too, up to 60A or even 80A since the ESCs should handle 100A burst and the BLHELI cutoff is quite strong.
Current Protection:
Current protection can be enabled to limit current. If enabled, then current will be limited to
maximum the programmed value. The reaction time of the current limiting is quite fast, so
current will also be limited during accelerations.
The value given for current protection, is per ESC. So if setting limit to e.g. 40A for each of
the ESCs in a quad (using BLHeliSuite32 or the BLHeli_32 Android app), then the total
current limit for the four ESCs will be 160A.
Maximum Acceleration:
Maximum acceleration can be set between 0.1%/ms and 25.5%/ms. It can also be set to
maximum, in which case acceleration is not limited. Limiting acceleration is primarily
intended as a backup parameter that can be used in cases where too hard acceleration gives
desyncs.
When setting to e.g. 10%/ms, it means that the power applied to the motor is not allowed to
increase by more than 10% per millisecond.
But I dont think Rampup power will change flight characteristics much, since it really only affects from low throttle (like idle) upwards.
Rampup Power:
Rampup power can be set to relative values from 3% to 150%. This is the maximum power
that is allowed when ramping up at low rpms and during startup. For low rpms, the maximum
power to the motor is limited, in order to facilitate detection of low BEMF voltages.
So if you can settle on a good value for Maximum Acceleration, then you might be able to increase Rampup a bit to ensure smooth startup.
I was reading though the BLHELI manual again, and Sine mode sounds perfect for these large motors too. I use it on everything and it’s never caused issues that I’m aware of.
thank you very much for your help, but I’m already at a dead end) I set Current Protection to 40 a. because at my first tests, the ESC exploded, there were several severe breakdowns, a shunt resistor and 4 transistors burned out… I changed the Maximum Acceleration in the entire range from a MAXIMUM to 25.5% … Ramp up Power also moved up to 3%, but with this setting, the motor no longer starts
unfortunately , my design will not allow the use of 6S power . I will not have large 22" propellers, I made the design for a 12 S battery and 18" propellers…
Ok then you should consider purchasing more robust ESCs like the APD F series. I happen to know their testing is far in excess of their advertised ratings, so they can definitely handle anything you throw at them.
I cant say I’ve met those Eagle motors before, and maybe they are not handling full power as advertised. An ESC limited to 40A should be more than enough, and the fact that it’s not is either a fault of the motor or ESC - unknown which at this point.