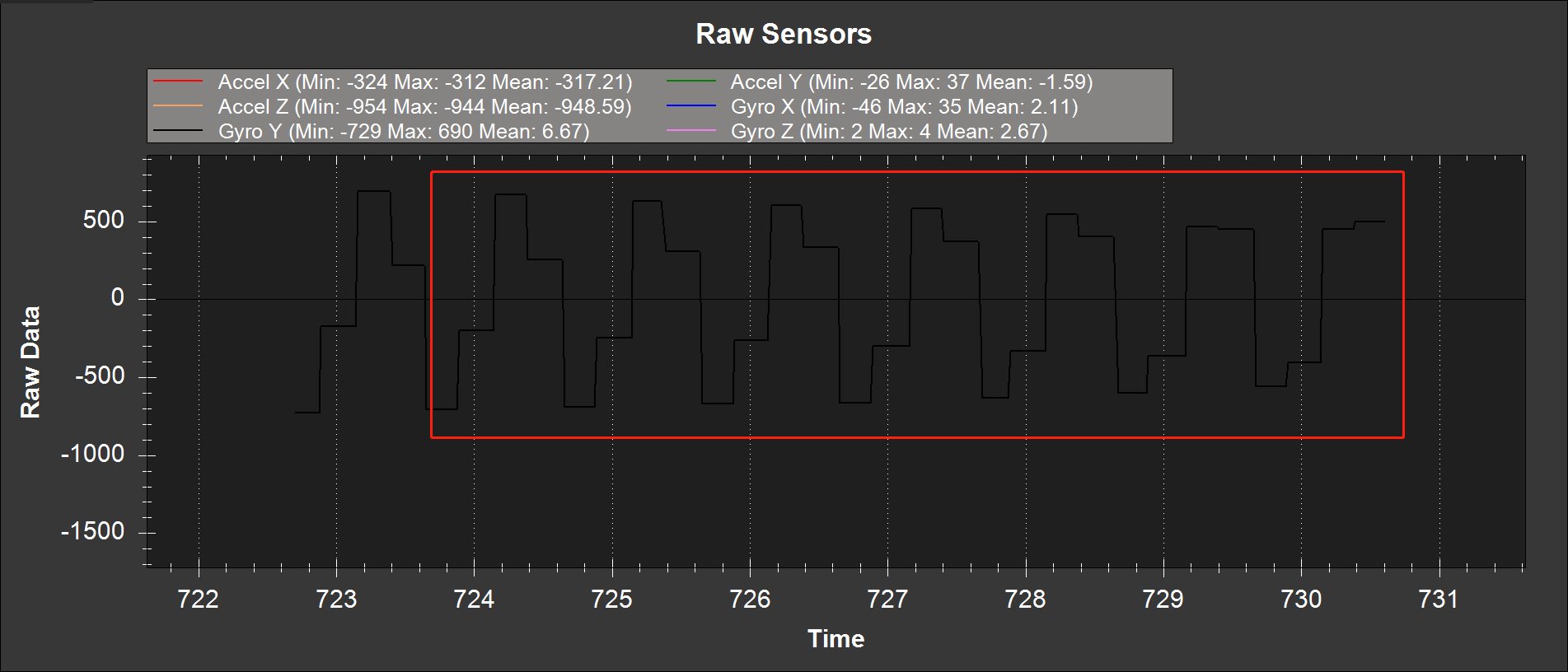
I was running SITL simulation and connected to the mission planner GCS. In the guided mode, after flying a certain distance, I found that the attitude of the vehicle was jittering and the ground speed was also unstable. The raw sensor data and the SITL gyroscope data are not stable?