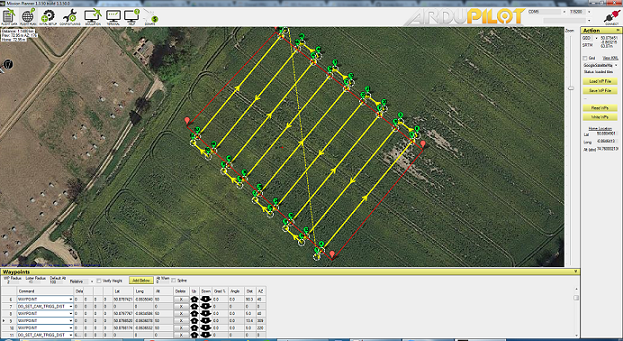
When planning a mission how do I ensure the quad enters my survey area facing forward? In the mission for the attached image of position and yaw I already set the overshoot to 5m with a flying speed of 2m/s. But the quad is still turning when it starts taking pictures again? (Survey start bottom left). It’s worse for 4m/s.
Is there a formula for overshoot in relation to speed. Or do I set a delay at WP? Surely as a quad it should be able to turn on a sixpence?
Thanks Michael. I’ve been looking at the MP settings, to confirm, are you saying I need to change the copter settings for YAW? I’m not a drone builder, which YAW settings would control this behaviour?
Sorry, I missed that. It’s set to “Face next waypoint except RTL”, which it kind of does, but it’s slow doing so, unless it doesn’t count the overshoot waypoints?
Mission plan attached, due to the overshoot I’d expect it to turn from 9 to 10, 15 to 16 etc.? But it’s coming in at e.g. 16 sideways, and only then starts to turn. All the left turns aren’t too bad, all the right turns come in sideways.