Flew my octo 12" today for gps testing purposes and had a small crash that ended in smoke (just got loiter to work right after gps relocation and mag cal outside minimizing interference).
Setup:
Copter 4.0.5rc2, flat octo, hobbywing flyfun30A (oldschool), foxtech w35-36 kv700, beaglebone blue on debian (imfatant instructions). Calibrated RC, accelerometers, gyros and compass. Also calibrated escs, though I doubt they were all well calibrated, some spin before others with a 150ms pwm difference max-min. I could fly pretty well though, very few vibrations and good control.
Flight:
Copter was 2m high, hovering very well in loiter mode, for about 3min when it SUDDENLY TIPPED TO THE LEFT SIDE (motors 5 and 7 seemed to slow down).
I flipped the disarm switch and modes switch (thats why it goes to stab towards the end) by accident with my finger movement.
As a lucky canadian, there is snow everywhere on the ground and both motors 5 and 7 (so 9h and 10h30 on a clock) dove in the snow.
Half a second later, smoke came from esc 7.
I unplugged the battery and saw snow everywhere in the bellhousing of both motors.
Both propellers 5 and 7 were braking because of esc drag (shorted motor wires post smoke). Unplugged both escs and could spin propellers easy (so no motor damage apparently, no other tests performed).
Now, everything that moves breaks, okay. But I fly a lot of 5" quads and often land in snow or water and just let it dry and I’m good to go even though it takes me a couple seconds to go get the quad and disconnect the battery. Does anyone have an idea why this would happen? Definitely seems like a mech failure but for it to happen to 2 closely located motors feel correlated to something else (software maybe? What then?).
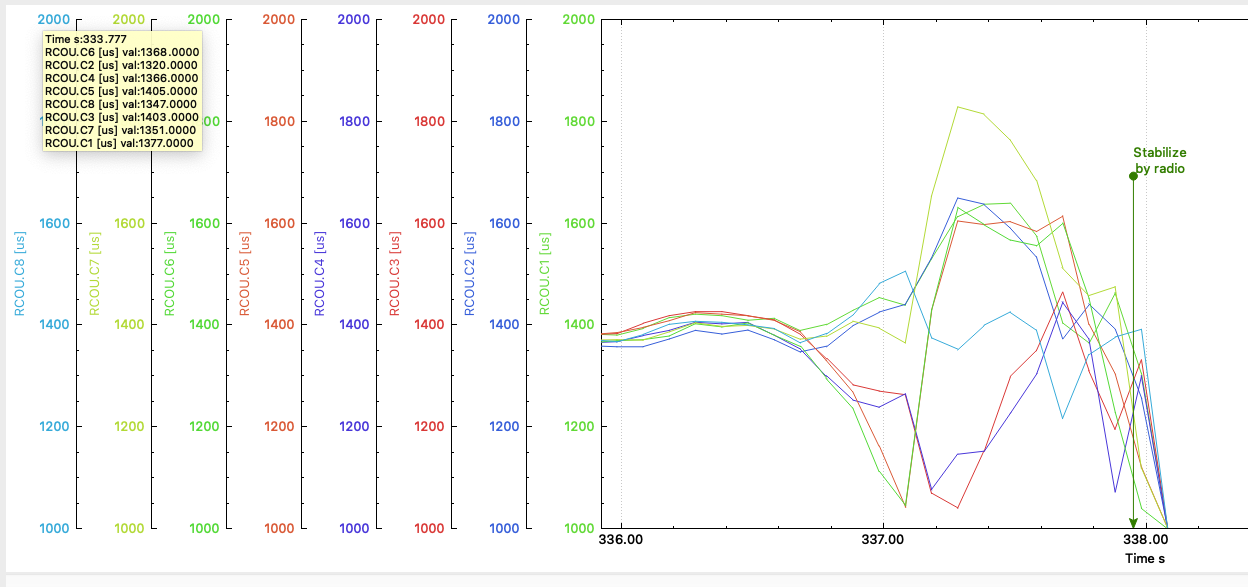
By looking at the log, I see that ATT.Roll goes crazy and leads ATT.DesRoll indicating mech failure.
You guys see anything else? How to go at it to reduce chances of it reproducing?
There’s a big jump in #7 before everything goes off. I wonder if you had an ESC failure in flight? But I would have expected an Octo to be able handle that. Snow won’t hurt the motor, but I’ve lost ESCs and FCs because of snow. Yeah, I’m another lucky Canadian…
Looks like ESC failure to me as well.
Also the motors that hit the ground should be thoroughly checked for damage that includes windings.
Make sure they didn’t get shorted…likely not but be safe.
Conformal coating on the ESC will help with snow if that’s a concern…Canadian as well.
I also coat any other electronics other then barometers…thats a bad idea.
Snow in the motors won’t be a problem but don’t spin the motors with snow in them Let them dry out and then blow them out. Becareful of grit that may be in the snow this can kill a motor fast. I keep a can of AIR in the flight pack to blow out a motor if it’s needed. Much easier then huffing and puffing. you can buy them at the dollar stores…but likely not for a dollar lol.
Thanks for checking it out, though RC7 has no output function assigned to it (you can verify in parameters). Indeed, there is a big variation nonetheless. An octo clearly can handle such a problem, but I disarmed quick because I’m used to smaller quads that are better off disarmed in mid air than crazy-quading their life around human heads. I might have touched another channel at the same time, though no function is assigned other than flight mode and ard/disarm.
Yep, checked for continuity between each motor wire and bell/base, none. I must precise that the octo is a 1.5m frame, so the only thing that got snow was really the bellhousing of the motors. the escs and other electronics are about 4" in the center of the frame covered by plates of carbon fiber and I had a platic bag around all electronics so no snow would get in (not my first snowy rodeo…)
The screen shot I included is RCOUT. That’s how APM Planner 2 displays your servo/motor outputs. RCOU.C7 corresponds to SERVO7, that according to your parameter file is SERVO7_FUNCTION=39 (Motor 7).
I agree about the disarm switch. That’s just a finger twitch away on my 5" quads.
Ho true, I looked too fast (didnt remember APM’s nomenclature). Well I think that shows it pretty much. ESC failure in flight. Thanks guys for your input.
Concerning such a situation, should one disarm as soon as possible if there is ESC failure? Would I be better to let the other 7 motors take care of a smooth (as possible) landing while risking a short circuited Vbatt from the failed ESC? I am analysing my reaction at the moment of failure and I wonder if I reacted the best I could.
Do your best to get it to the ground in a controlled fashion and then disarm and battery out. IF you kill it in the air you risk more damage and uncontrolled decent… That said, I admit I have had a few in flight failures and getting them to the ground in one piece can be a challenge.
much to my surprise the arm snapped causing the motor to pitch up and strike the next arm and slice it. I was shocked. I build better drones now. lol. It was a total write off.
indeed haha! what diameter arm were those? so I don’t use em
By analysing your video in slow motion, we can hear a frequency variation just before the arm breaks. Also, there appears to be no contact betweem the broken motor and the other 2 close to it, which would mean that the hex did not recover from a single broken motor. Hum.
16mm arms and it was a few years ago.
It seemed that the motor mount broke, you can see it snapped at the transition from the arm to the mount. From there us was all down hill.
That’s the big question. The problem is in flight you don’t know if it’s an ESC failure, or motor failure, or signal wire failure or…
If there’s a problem in flight my opinion has always been that if I can still control it (even if it’s flying poorly) I’m going to fly it to the ground. I’d rather crash it on my terms or take the walk of shame across the field to pick up the drone then let it fall from the sky.
If I can’t control it or it’s getting away from me then terminating the flight might be the best option. Or the least bad one.