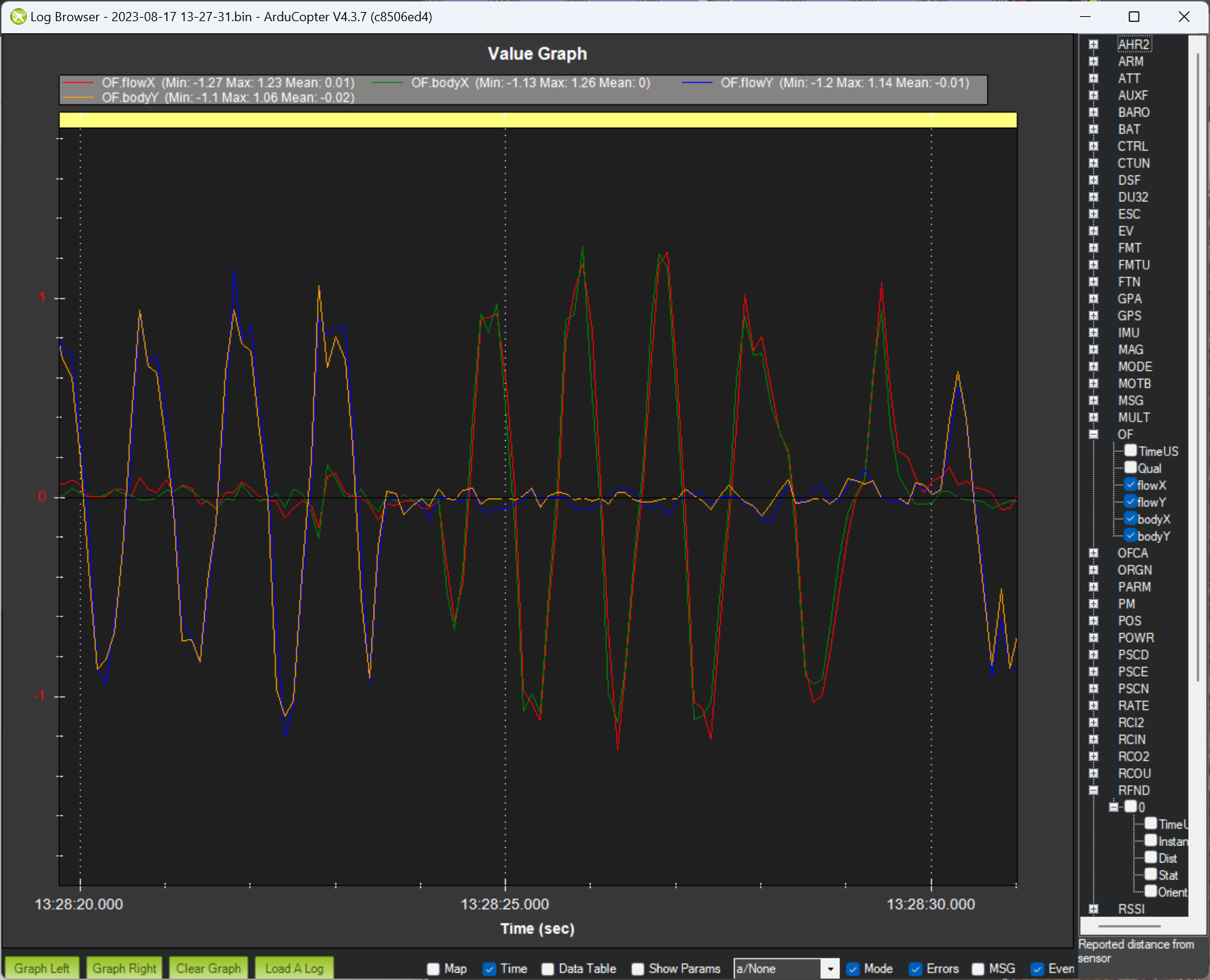
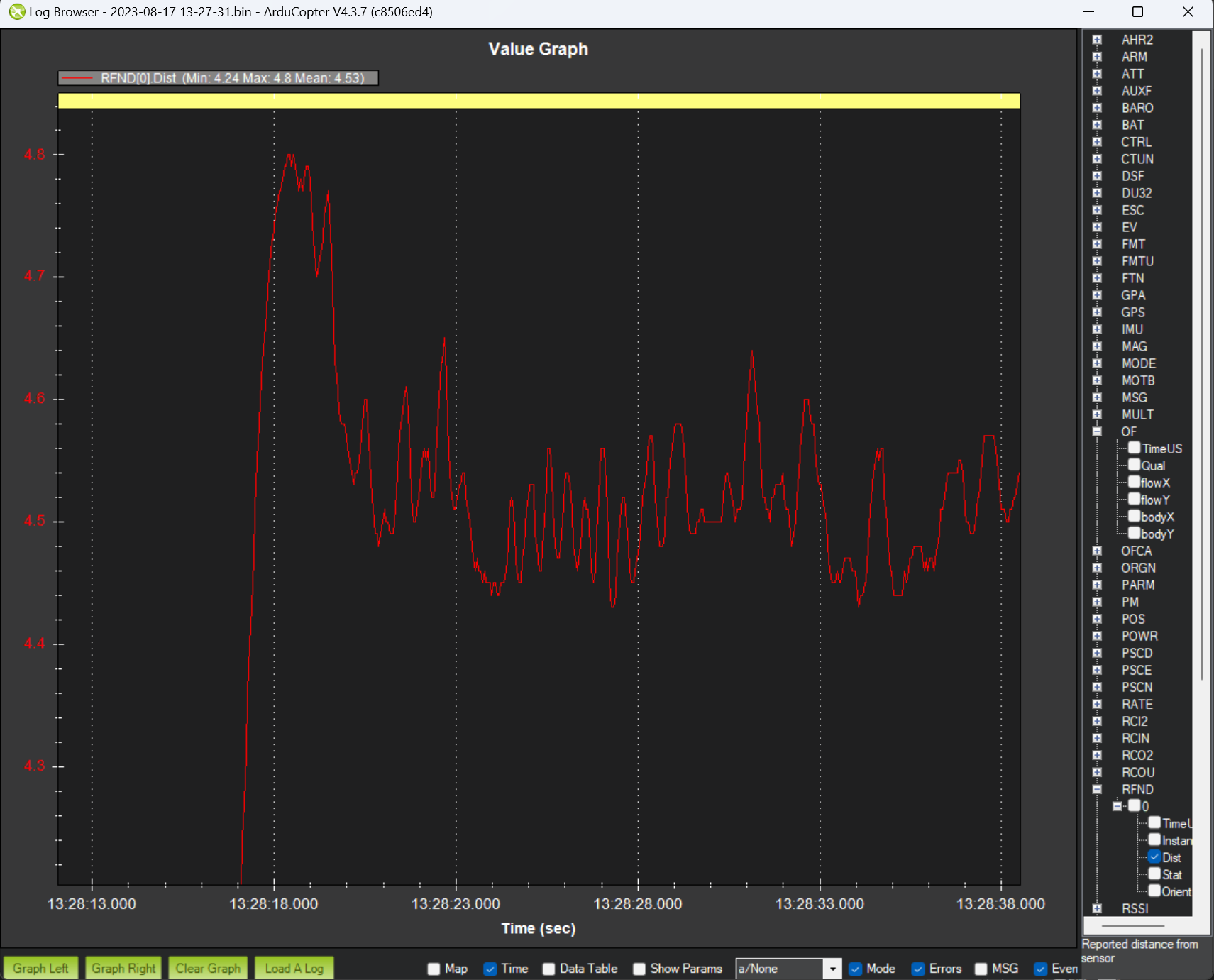
I have a quad that is otherwise tuned well flying excellent in all modes with a kakute h7 mini, tfmini-s, and m10q gps. I am trying to add a Matek 3901-L0X flow sensor to it, and so far it seems to be working well using the scalers provided by Matek (-800/-800). However I tried doing the in-flight flow calibration per the manual using rc12_options=158, but it never seems to succeed (scalars remain 0 afterwards). I don’t have telemetry (outside of elrs), so I can’t read the GCS messages as suggested in the manual. Modes in the log don’t go to 158, just 5 for loiter, but not sure if it’s supposed to show mode 158 during flow cal. Logs also showed continuous and smooth rangefinder data throughout all flow cal flights. I do have some ancient sik radios I could use for this, but my UARTs are already full (could scrap esc telem wire to get r7, but no t7 unfortunately). I was hoping to find something in the logs to show if it even started trying to calibrate, or a reason it may have failed.
To be clear, I’m following the manual exactly except the 10m min. Ekf3 parameters are set to match the manual for in-flight calibration. I’m even taking off in loiter, up to altitude, switch ch12 to 2000uSec, and rocking pitch/roll just like Randy did in his demonstration video. I was only able to climb to ~8m (not >10m) due to a tree on site. Logs are showing ch12 high while in loiter, and logs also verify I saved rc12_options=158 correctly… but the scalers never change from 0 after the calibration flight after separate 2 attempts.
I must be missing something simple. This is with a kakute h7 mini using serial 1. Is there another way besides adding mavlink GCS telemetry for me to see how flow calibration is doing realtime? Is there any other log I could look at that would help me troubleshoot this? Is there a hard coded limit to where flow cal doesn’t fire if below 10m?
I’d just roll with -800, but Randy mentioned many times that in-flight cal is the way to go as it’s more precise.