On a previous post, the helpful respondent noted a vibration issue on one of my quad-copters.
I’ve uploaded the BIN file from yesterday’s test flight that shows this problem.
It also shows that IMU-0 and IMU-1 have excess vibration in the X axis, but IMU-2 has excess vibration in the Z axis.
As a relative newcomer, I don’t know how much vibration is “too much”. All the graphs tell me is that not all three axis report the same vibration.
And I don’t know what it means that the three IMU’s don’t all report the same.
If someone could point me to some resources to learn about this, I’d greatly appreciate it. Any other comments or thoughts would be appreciated too. Thank you!
The wiki says that vibrations over 30 are too much, but many will say you need to be much lower. Below 15 at least.
The first thing I always look at is the clipping. In that file the clipping is 0, and that’s good. That means the vibrations that are being detected aren’t overwhelming the IMU.
Here’s my thoughts on vibration analysis:
If X AND Y are both high, then you may have an issue with a motor bearing or prop balance. Or you may need more/better overall vibration damping for your FC.
If X OR Y is high then you may have an issue with your FC mounting. Maybe a wire or is bouncing on the FC or restraining it. Or you maybe your vibration damping works better one way than the other.
If you have a Z vibration then you may have a track issue with propeller (bent blade) or vertical play in a motor.
Of course these are just my starting points when I’m looking at a vibration. Others will take different approaches. Also consider that some flight conditions/airframes will have different natural vibrations. The vibrations on your machine look good in a hover, but the X goes up with speed. Perhaps an aerodynamic issue on the airframe, or the wind, or… Unless this is showing up as jello or other issues in your video then I’d say this is livable.
I’m not sure why your IMUs are reporting different vibration directions.
This copter has a new gimbal - from your comments, I’m guessing it’s playing a role. And my camera as no jello as you can see from the video: Tribble Mill ROI test no sound - YouTube
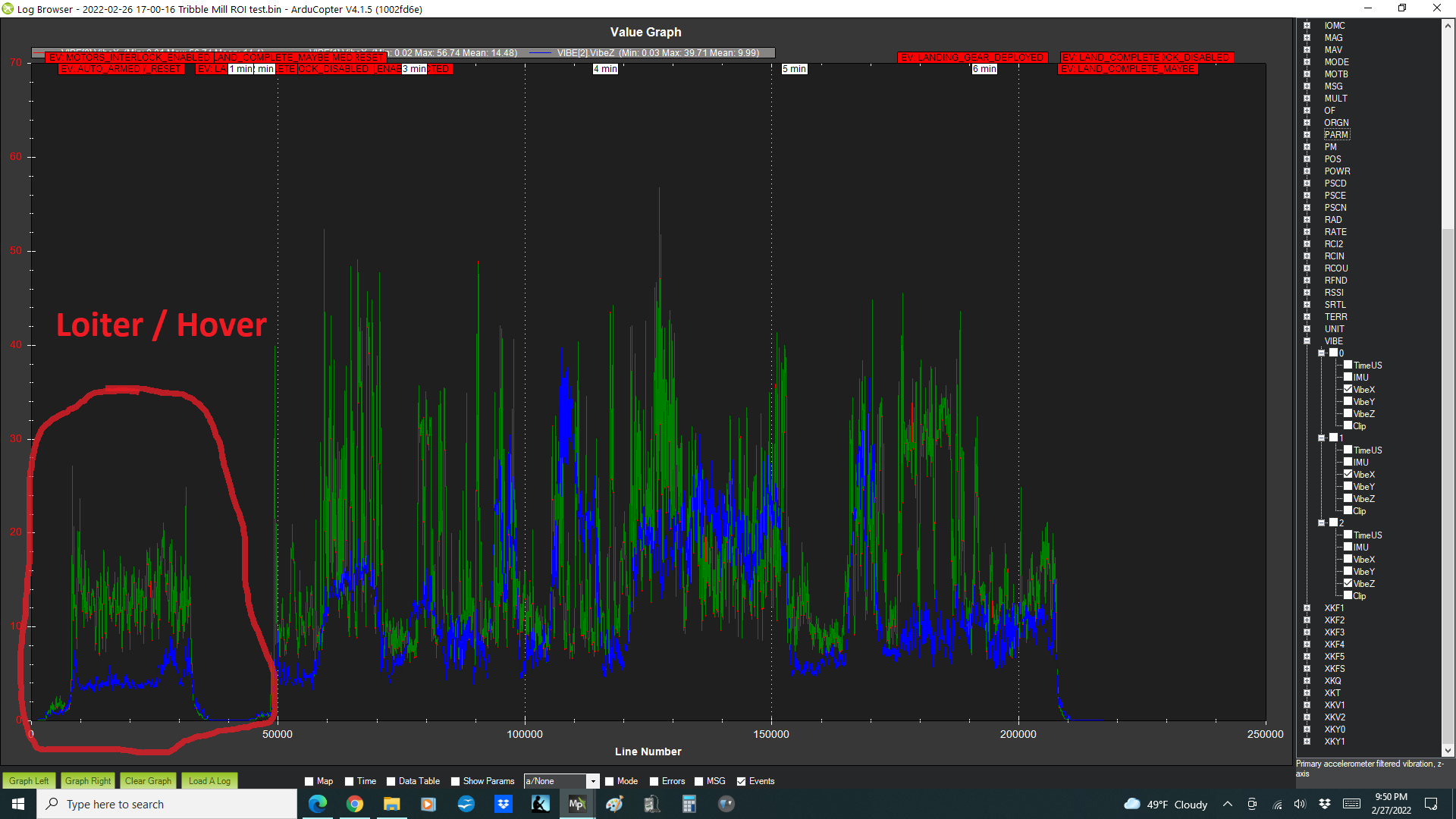
This test flight is actually two flights - first is a minute or two in loiter just hovering over the takeoff site - then landing.
I charted the IMU0-X, IMU1-X and IMU2-Z axis - all three that had high vibrations.
You can see that the axis that show poor vibration in flight are all under 30 when in hover.
Can you please point me toward info about “clipping”? I’m not familiar with that aspect.
Allister - Holy cow! There it is in black and white! I’m going to be embarrassed for a bit…
I confirmed no clipping by graphing “clip”. I’m not exactly sure what “clipping” means - but for now I’m OK with the fact that having none is good. I’ll have to dig into that and see what else I can learn.
Thanks so much for bailing me out here Allister - I really appreciate it!
When an event exceeds a sensors Full Scale measurement range. 16g for 2 of the IMU’s in a Cube Orange. The ICM20649 has a possible 30g range but I don’t know if that scale is used.