Hello,
How does the ardupilot achieves to correct YAW aligment for the IMU (accelerometers mainly)?
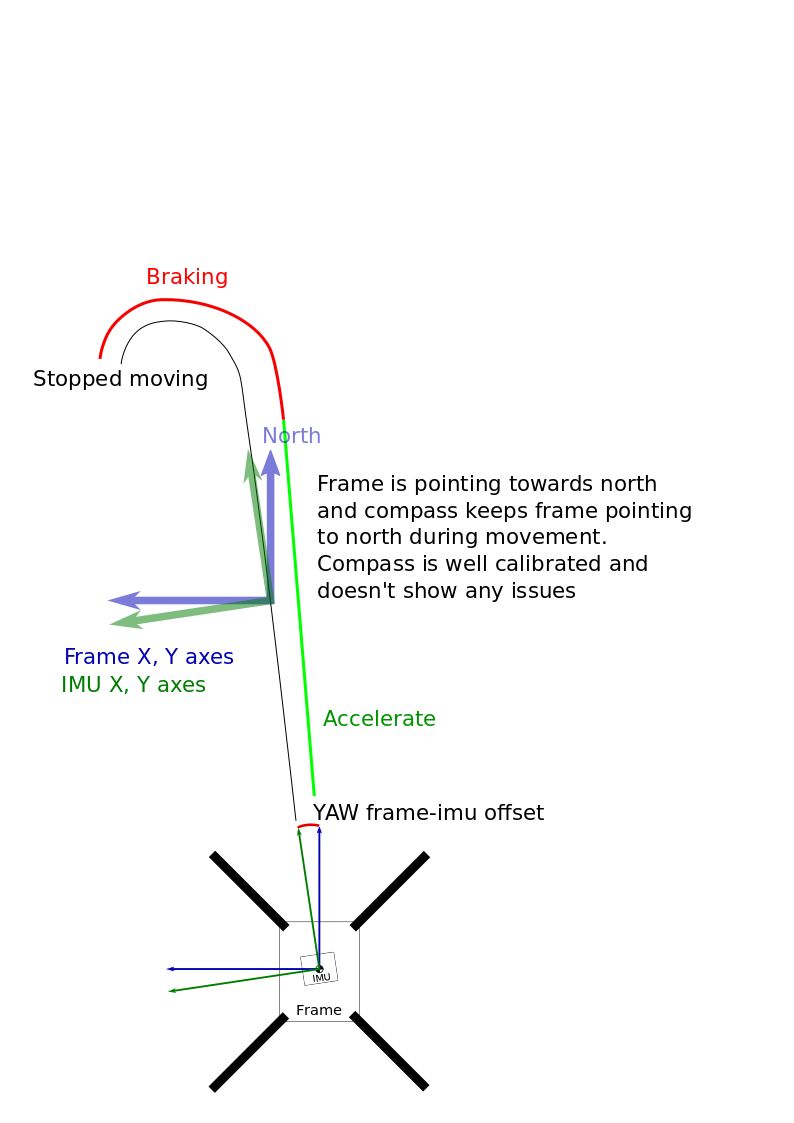
Accelerometer calibration seems to do only offset and scaling fit on X,Y and Z axes. However this doesn’t align sensor forward axis with the frame forward axis. Is this error corrected by EKF? Anyway this could cause drifting from wanted direction at beginning of the flight before EKF has converged that error?
Is there a way to correct this by parameter or by a calibration?
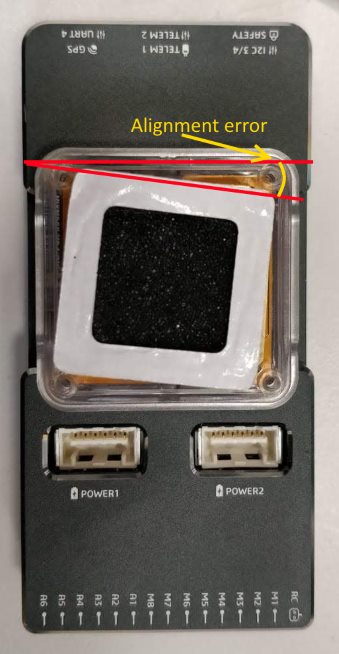
IMU (Accelerometer) can be offset compared to actual housing “forward” direction, as seen on the image below.