Hi,
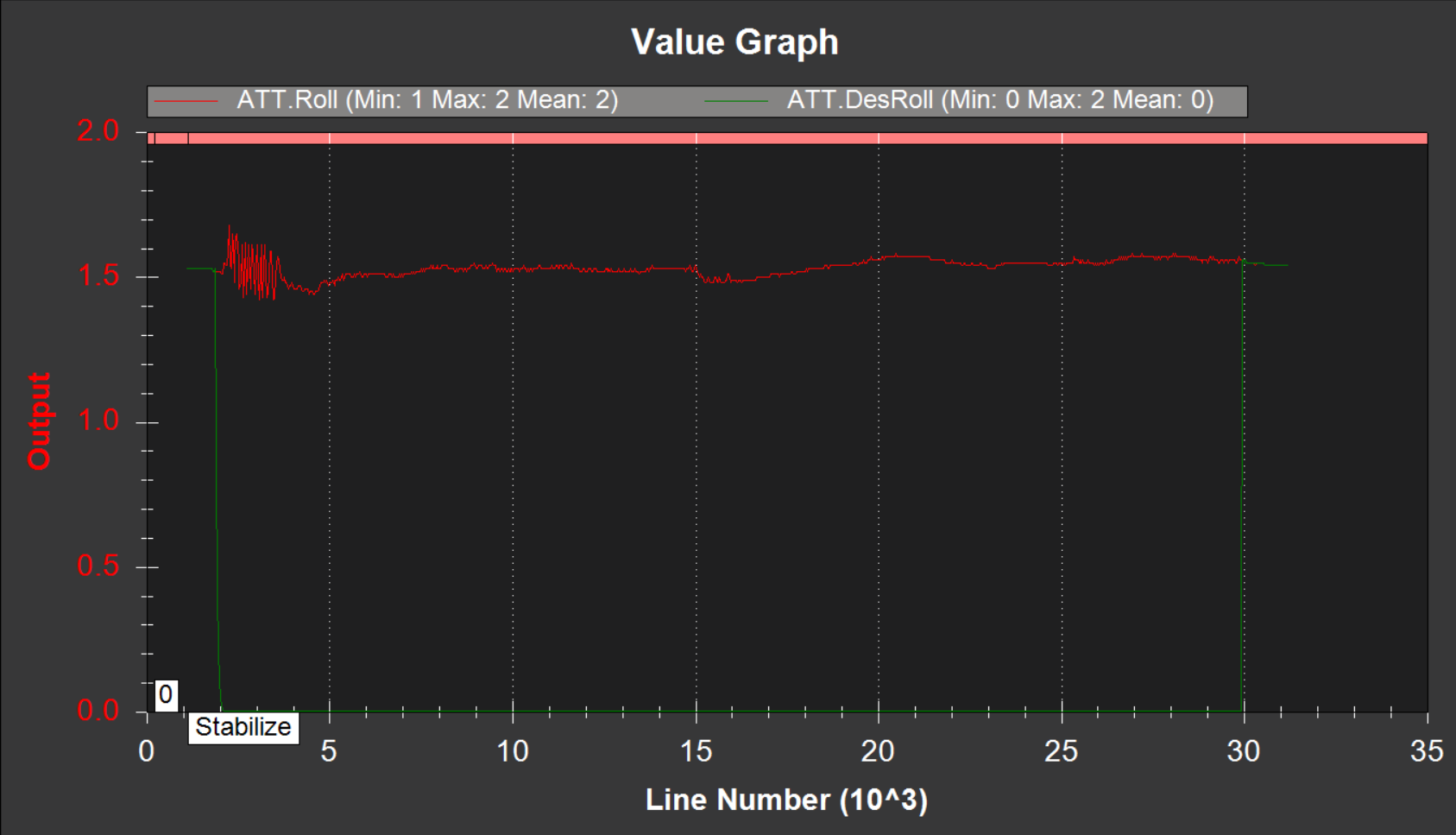
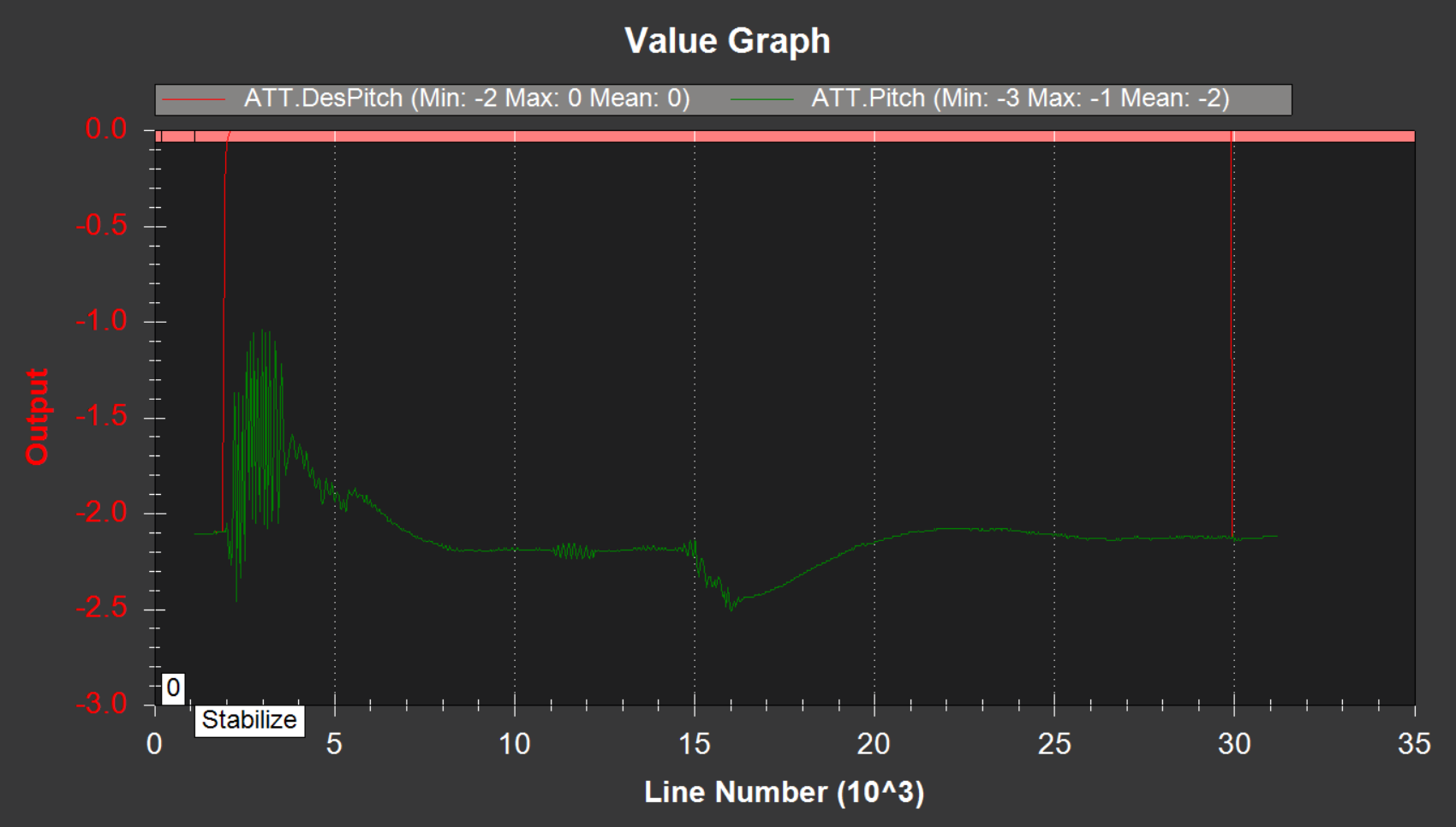
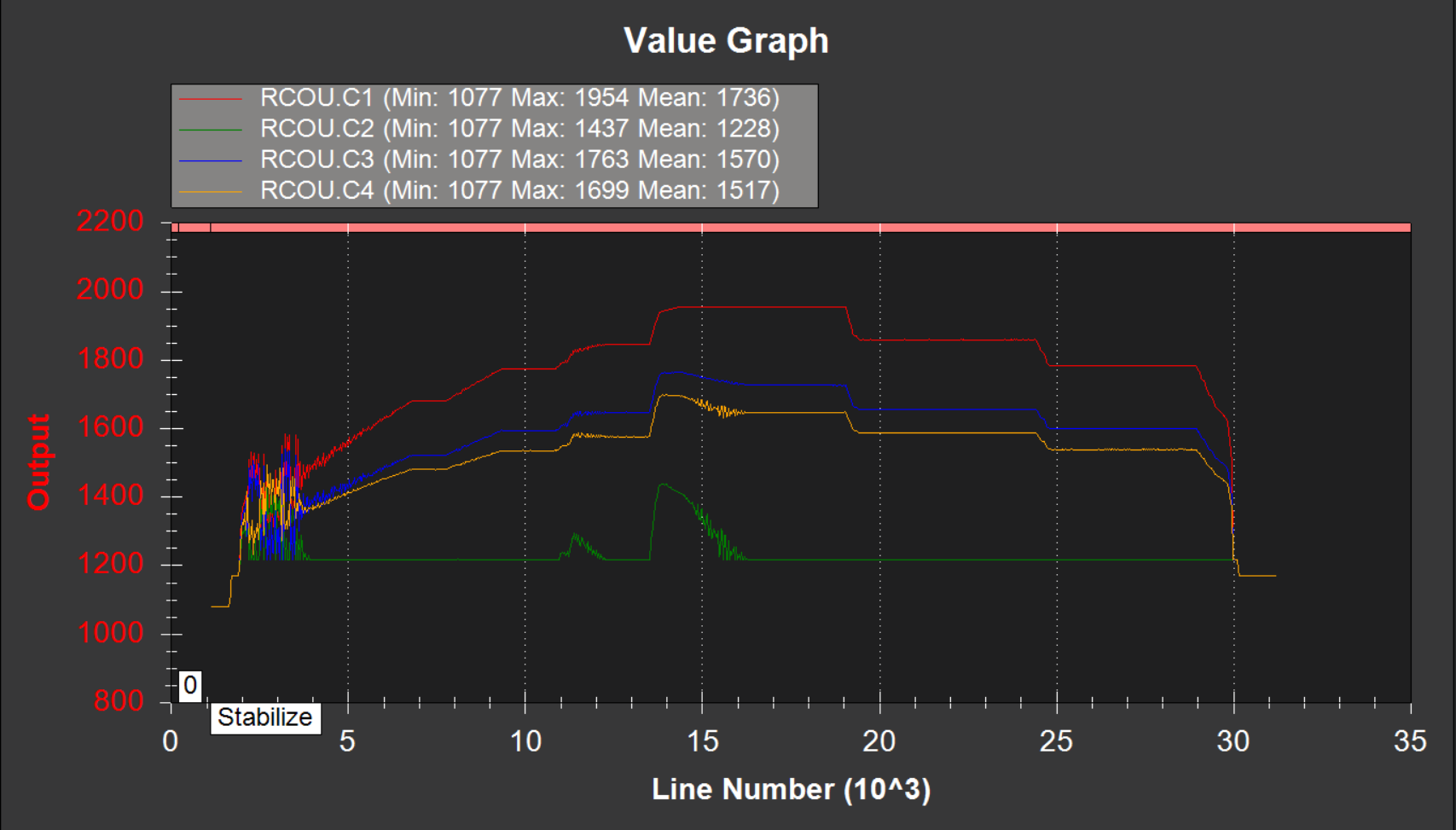
After successful calibration, I tried to apply little thrust gradually without any propellers. So all the motors should run in same speed and roll and pitch should be zero. but In my case it is not working properly( as shown in graph) there is some roll and pitch angle and there is difference in motor speed. So if any of you have any suggestion please reply.
thanks in advance.
Hi, Welcome,
without props, that testing is of little use.
Have you read this,
https://ardupilot.org/copter/docs/tuning-process-instructions.html
Start from there.