I am very new to this field. Currently, I want to plan a mission using GPS only. I want the relative values of drone with respect to a vehicle. However, I am getting a lot of GPS inaccuracies and drifts with my data. Can anyone help me out with that on how to improve or what parameters can I change to improve ? I am using Mav::Common message(GLOBAL POSITION INIT ) to get the data .It comes with fused accelerometer and GPS values.
Here Tular is my vehicle: gps_data_logger.txt (200.9 KB)
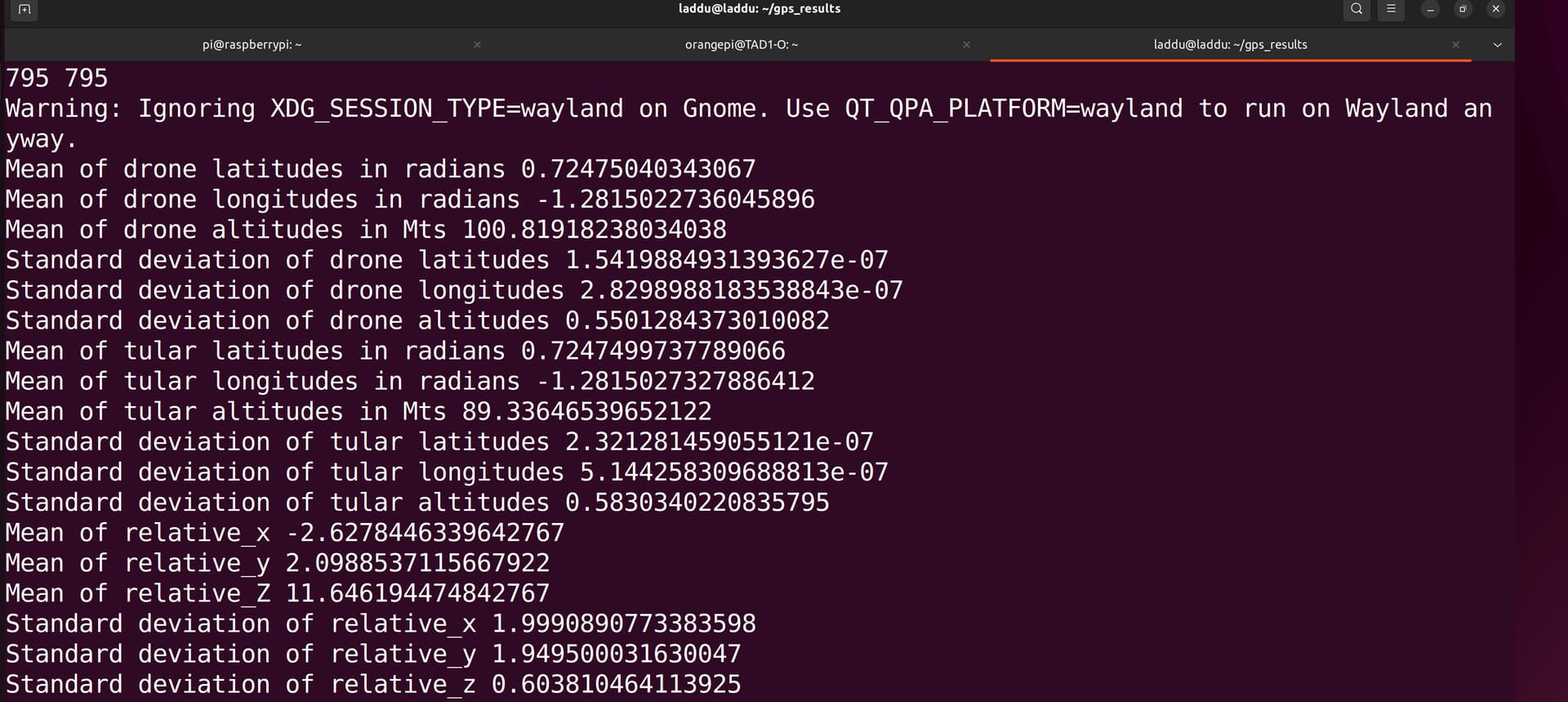
My standard deviaitonof relative pos in X is around 2 meters
My standard deviaitonof relative pos in Y is around 2 meters
My standard deviaitonof relative pos in Z is around 70cms
Thank you, so much for replying. I don’t know much about this as I am still exploring. However, do I need to buy the RTK base station and its module to use the RTK GNSS system?