Hi,
I was looking to test the new geofence polygon feature but I’m facing some issue. I think the issue is from Mission Planner side. I’m opening this discussion before opening a ticket for resolution.
I followed this explanation plage: http://ardupilot.org/copter/docs/polygon_fence.html
I have the same issue with ArduCopter V3.4 Pixhawk and with SITL 3.5-dev version.
I tried with 3 versions of MP: last beta (help->upgrade beta: 1.3.41.3), 1.3.39 and 1.3.41 (msi install).
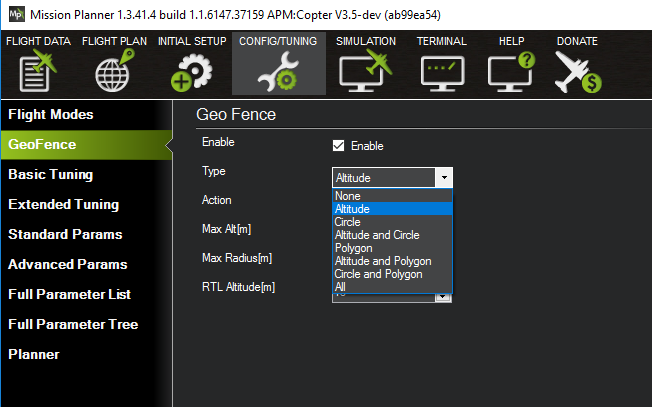
If I want to setup the GeoFence, I go to Config tab, GeoFence and I have only Alt/Circle mode available as per image:
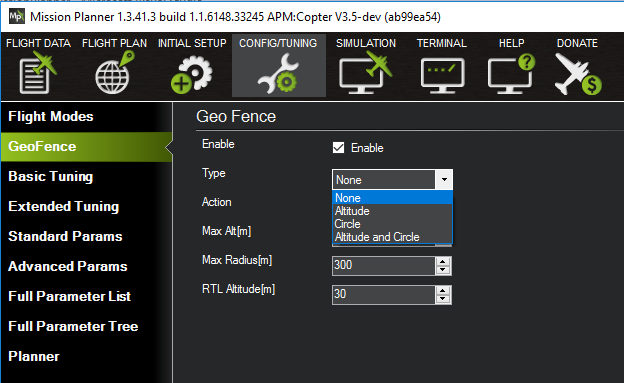
The trouble also is that if I have FENCE_MODE = 7 in the copter it will change it to 3 without saying it.
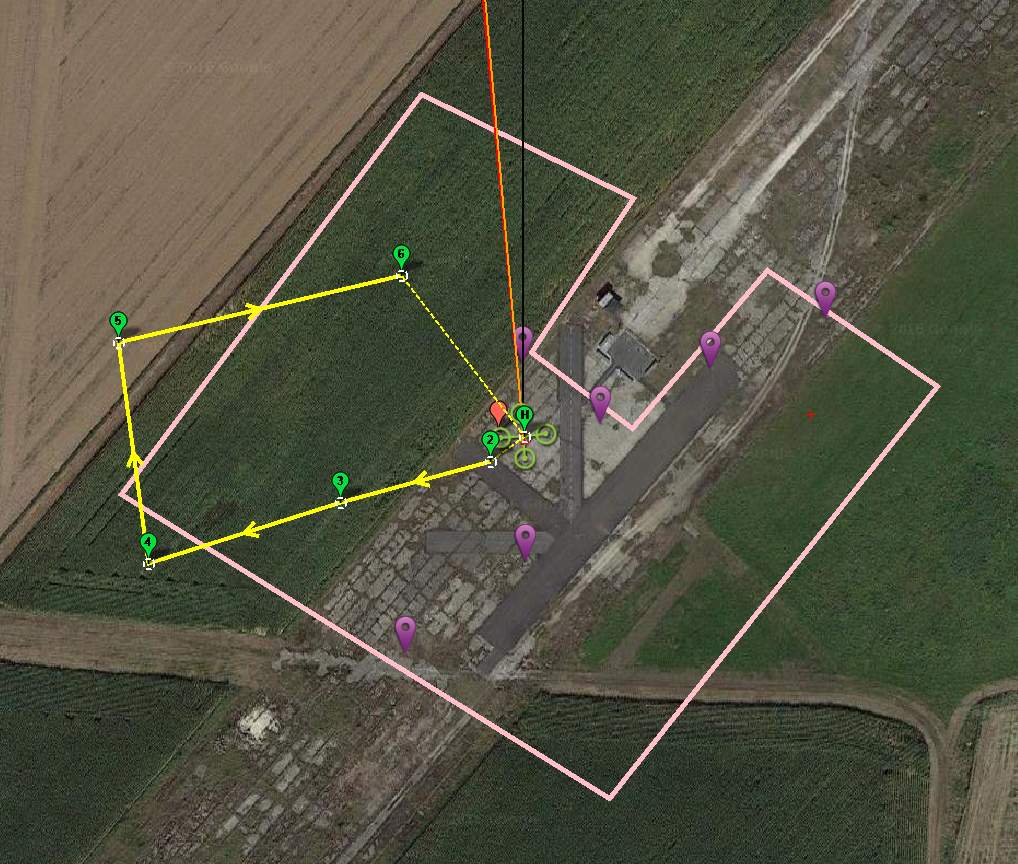
I can set FENCE_MODE = 7 using mavproxy, I can set the GeoFence with the polygone from MP (Upload). Doing that all simulation in SITL works.
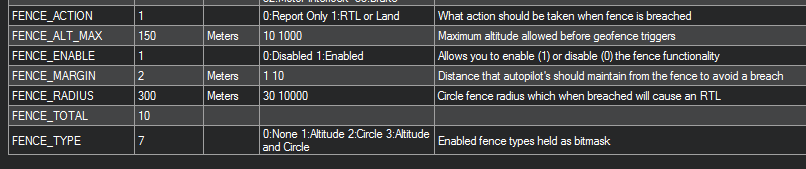
Looks like the list of FENCE_MODE used by MP is limited to 0 to 3 as we can see in the description column (Got 7 after refreshing data and mavrpoxy to 7)
Is it a bug or I’m missing a basic step/configuration to do ?
Everything else work very well 
I can do any test needed to investigate. I have even compiled on my machine a MP with visual studio.