Maiden flight with recently built Hexacopter (F680 frame) using Pixhawk with 3.4.6 FW and I have problems with Alt Hold and RTL when trying to land. Copter climb suddenly when close to ground trying to land.
I have built some similar copters (not so big) with APM and never had this issue.
I’m thinking about Z axis vibration or barometer problems when close to ground, but I haven’t so much experience with dataflash logs to figure out the exact problem.
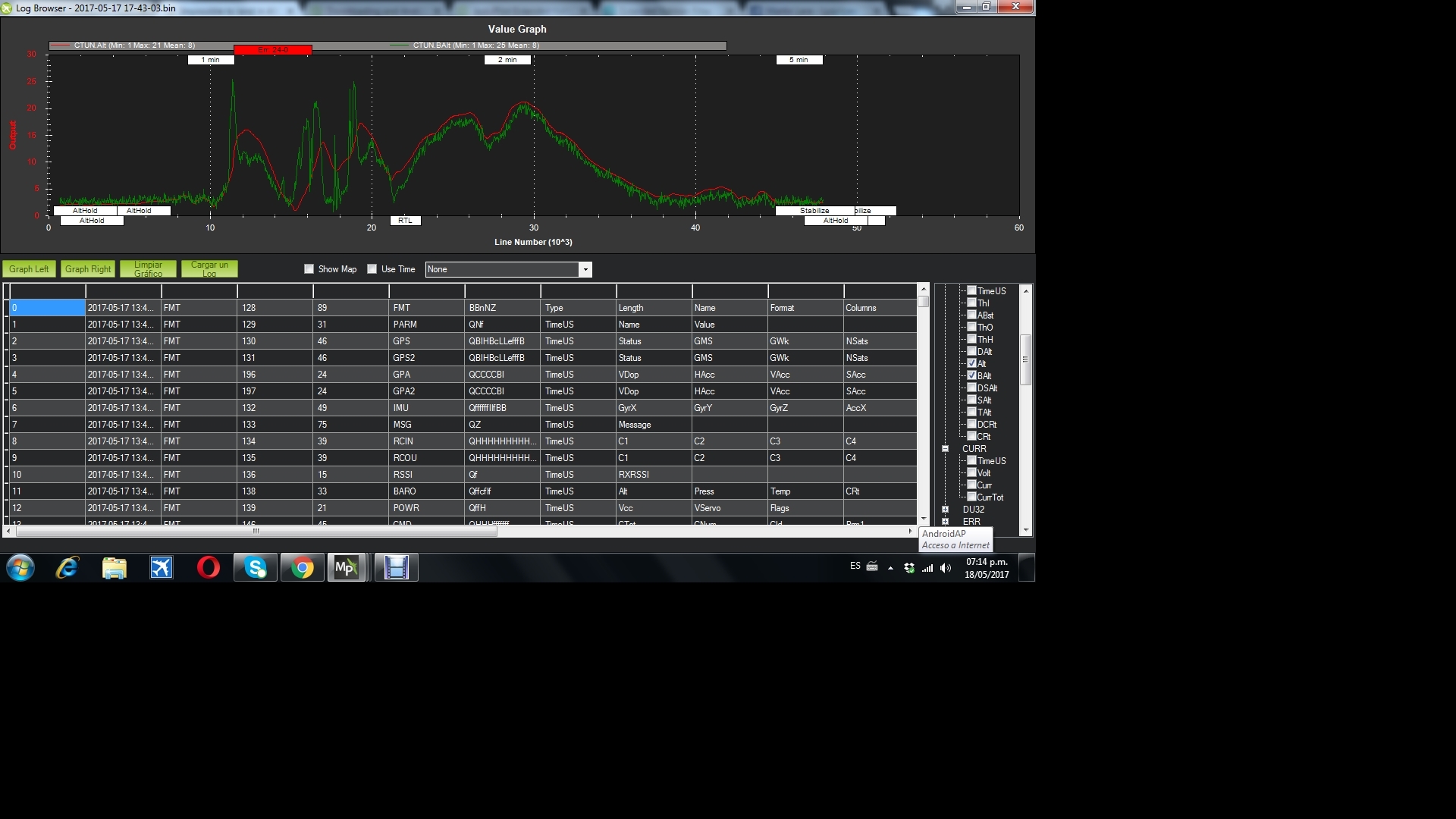
Attached is log. You can see throttle is at minimum almost all flight but copter didn’t land and altitude is erratic.
Hope someone can take a look and give me some clue about the problem.
Thank you for taking a look into my log.
Tonight I realized the problem about RCOU different outputs in different motors.
I have checked and motors+ESC+props are the same (obviously some CW and some CCW). Maybe bad ESC calibration? Courious coincidence anyway…
I will check ground effect compensation configuration in my pixhawk, but what I have experienced is not only a bounce, it won’t land anymore during some minutes…
Did you saw something weird in barometer or Z axis vibrations?
There are some spikes in the Z axis vibration which I think are just from when the copter touches the ground.
You could probably reduce the vibrations further, but I’m not sure if this is the cause of your problem.
Barometer readings look normal to me as well.
I think it’s possible this is a simply a consequence of a mechanical issue.
For now I would only focus on the motor outputs until you can see that all the motor outputs are similar levels in a hover.
I think the frame you have has round carbon tubes for the arms (Tarot FY680?). Make sure the motor mounts are all mounted exactly level on the tubes
You could try re-calibrating the ESCs just to eliminate this as a cause, but I don’t think this is the problem.
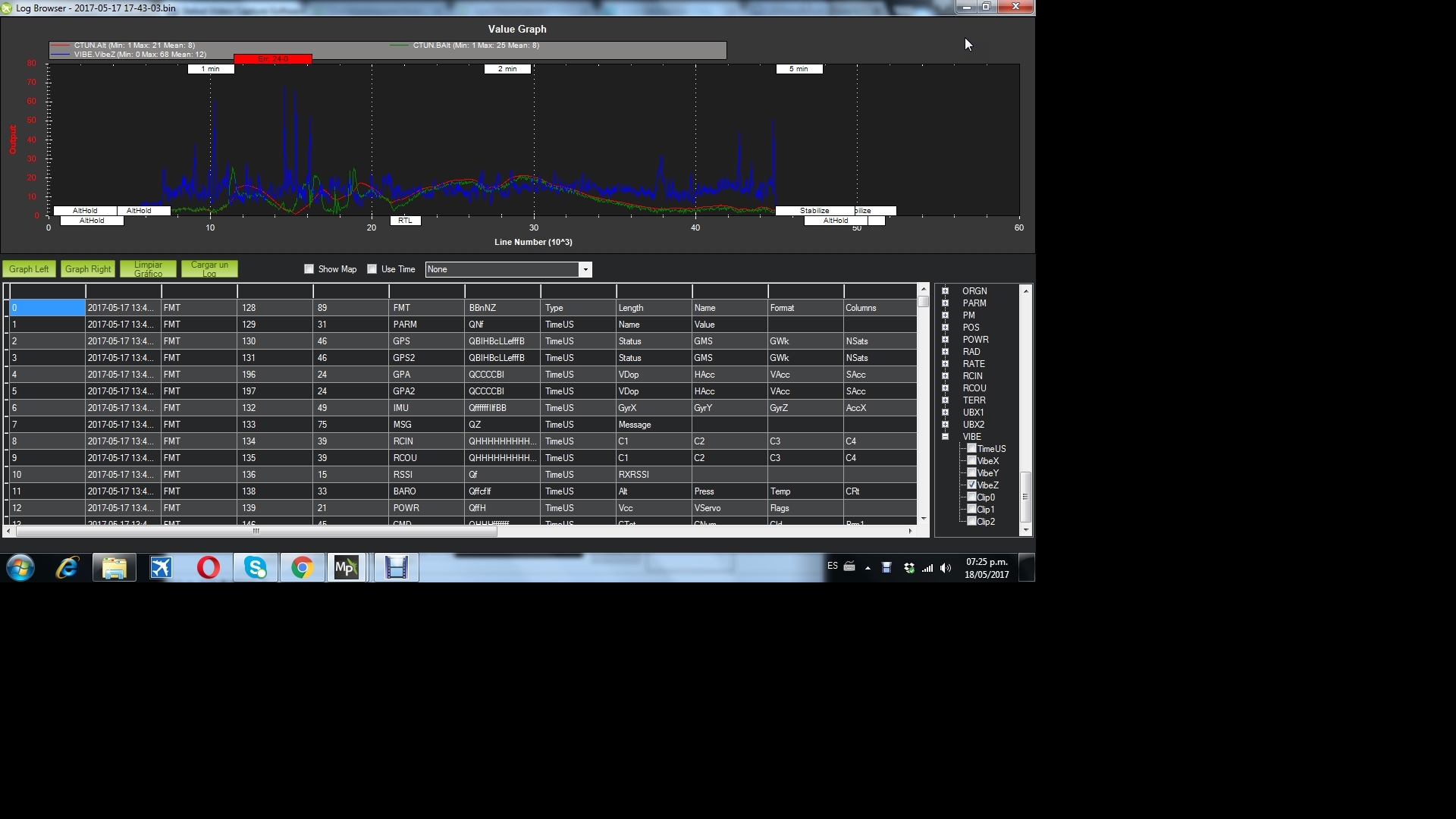
I looked at your logs…seems like you are having some serious vibration issues…look at the clip 0 clip 1 files under vibrations…they should read 0…your is at average 40 on clip 0…and average 77 on clip 1…clip 2 reads 0 and looks fine…vibrations can come from some of the most unlikely places/parts.
Graph the Clip0, Clip1 and Clip2 values which increase each time one of the accelerometers reaches it’s maximum limit (16G). Ideally these should be zero for the whole flight
@leo_kowal It would appear that the clipping is only occuring when the copter hits the ground, not when the copter is flying. This is normal if the landing is fairly hard. Clipping that steadily increases during flight is a problem however.
Yes Justin, frame is Tarot F680 and has round carbon tubes for the arms. When mounted I checked motor mounts were simetrically placed (same distance from center) and level, but I will double check for inconsistency in this aspect.
Anyway, it is very weird this ocurr for different rotating direction. Maybe bad or unmatched propellers? I have bought them paired, but maybe something is wrong.
When in the air, copter is very stable. I’m confused about that.
I think I should try to try a fly in stab mode and see log to discard this vibration issues…
Thank you for your help.
Any other comment or idea will be wellcome!
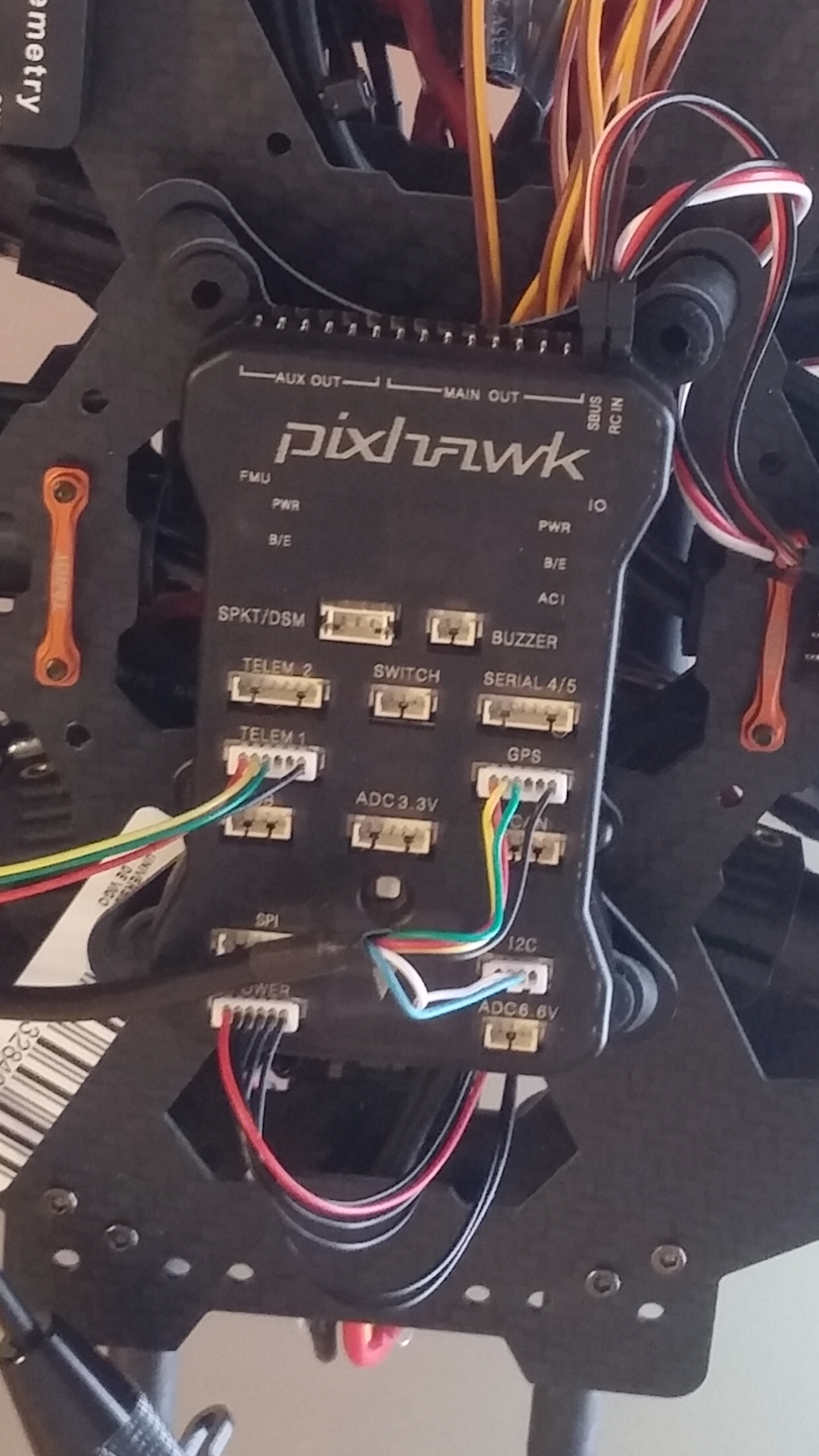
I will post a photo as soon as I arrive at home.
I will try to upload even a short video of THIS flight.
Props are 13" and pixhawk is placed at the center in the same Z height as props.
I will cover pixhawk with foam or similar and fly. I hope good weather come soon here in the north of Spain…
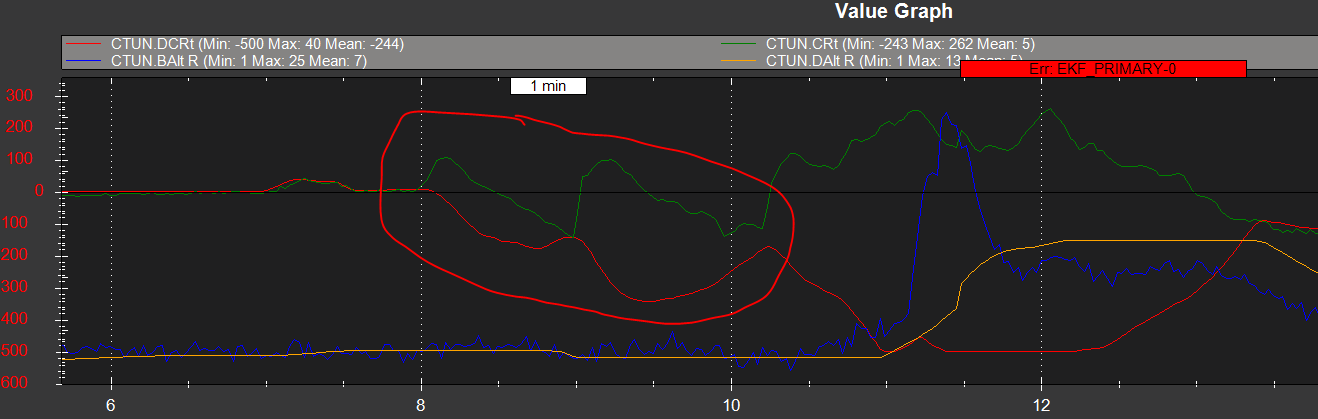
Here compare alt issues with vibs spikes.
Or something is hitting the frame time to time or props ground air is affecting your baro perhaps; inspect your frame carefully if something can have movement or try to cover the Pix with something like an inverted boul like this http://diydrones.com/profiles/blogs/sf-11-laser-altimeter-an-usefull-tool-for-agriculture-purpose
…y aguantate las cargadas de la ensaladera si te llega a andar ; tenenos al tanto, Suerte.
I had a look at the logs too - really does look a bit funky what is happening, and your video is truly scary!
I am not an expert in AltHold, but looking at the log something seems to be odd with your vertical climb rates - apparently before your copter even takes off the FC is requesting a negative climb rate because it believes it is climbing - Barometer does not show any climb though !?
Have you tried flying in StabilizeMode yet though?
In my experience it is important to get a good performance in StabilizeMode before even attempting to try the more automated modes - maybe something to try?
also be mindful of anything plugged into the pixhawk…if a wire or whatever connected to the pixhawk is receiving vibrations …ie…I had a micro to mini USB 10" cable from my pix…to a frame arm…for easier plug in.
I think it was causing part of my vibration problems…i unplugged from pixhawk and much better.
Anything that could be transferring vibrations to the Pix…hope i made sense
Propellers were the problem. They were too big and they had bad balance between CW and CCW ones.
When hovering, stabilization rotation variations made hexa lift.
We moved from 13x4.7 to 12x4.5 and everytthing is fine. Hexa is able to take off and landing in Alt-hold and Loiter smoothly and with no bounce.
 ; tenenos al tanto, Suerte.
; tenenos al tanto, Suerte.