I am currently working on enhancing my ArduPilot-based rover by replacing the traditional compass with a dual ZED-F9P module setup to derive yaw values, utilizing survey-grade antennas for precision. Despite adhering closely to the official GPS-for-yaw documentation, I’m encountering detection issues with the GPS modules when configured as GPS_TYPE 17 and 18. However, the GPS signals are recognized when set to NMEA or UBLOX types.
Attached is the parameter file for the Cube and the configuration files for both ZED-F9P modules (Moving Base and Rover). I kindly request a review of these files to identify any necessary adjustments.
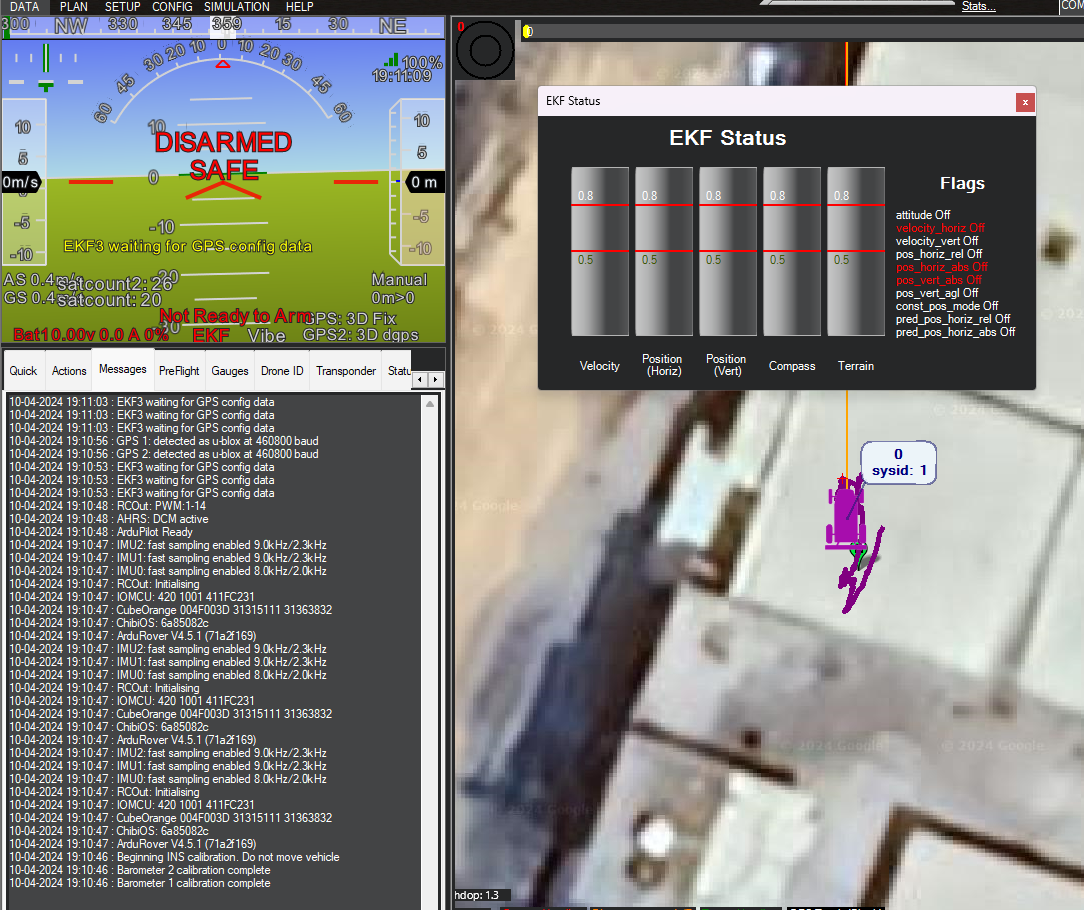
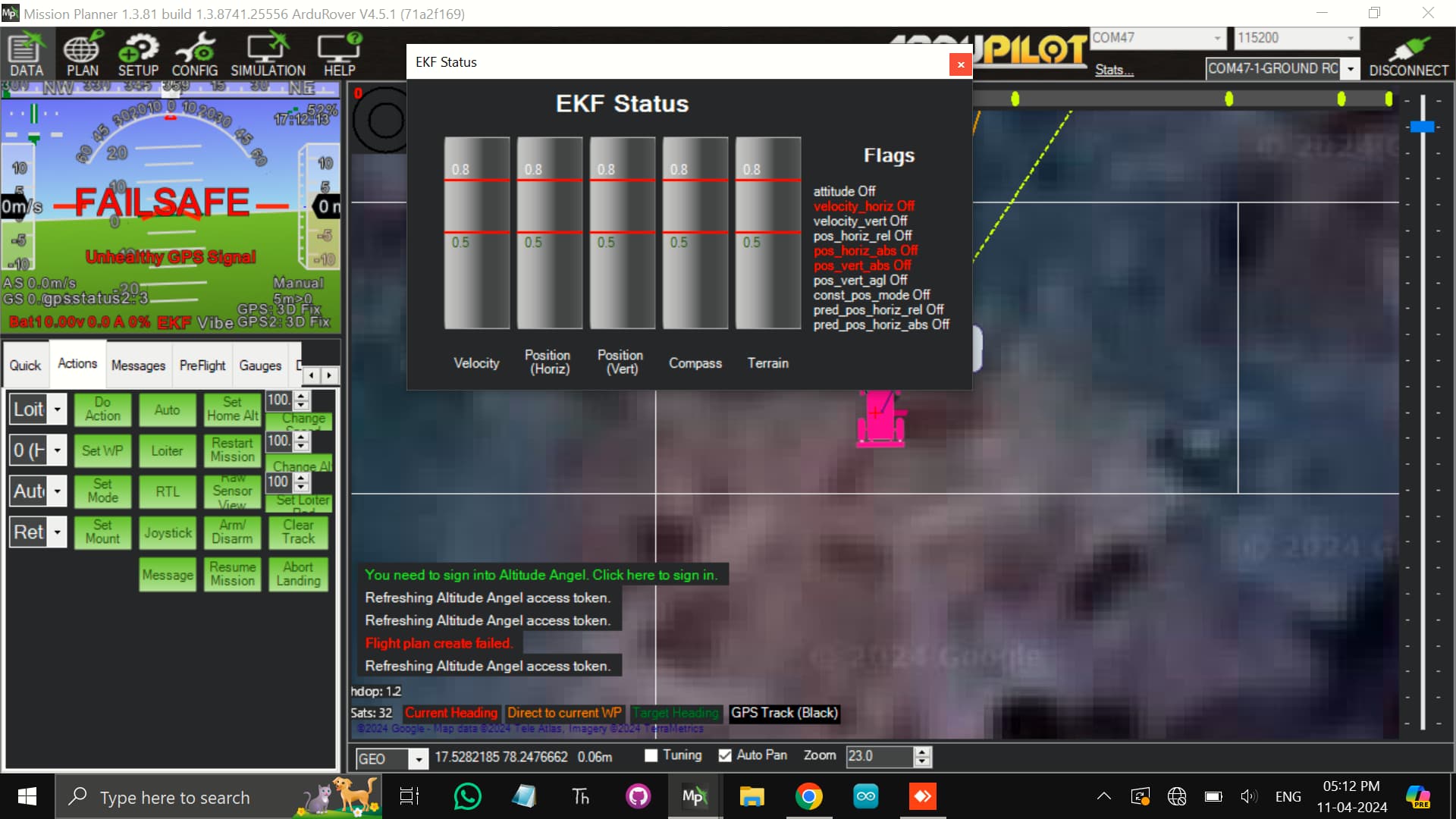
Sorry for the inconvenience caused. As you mentioned I changed every parameter as per the link and attached the param file for your reference. The good thing is I can get GPS signals now but still some errors are coming. I attached error images also.
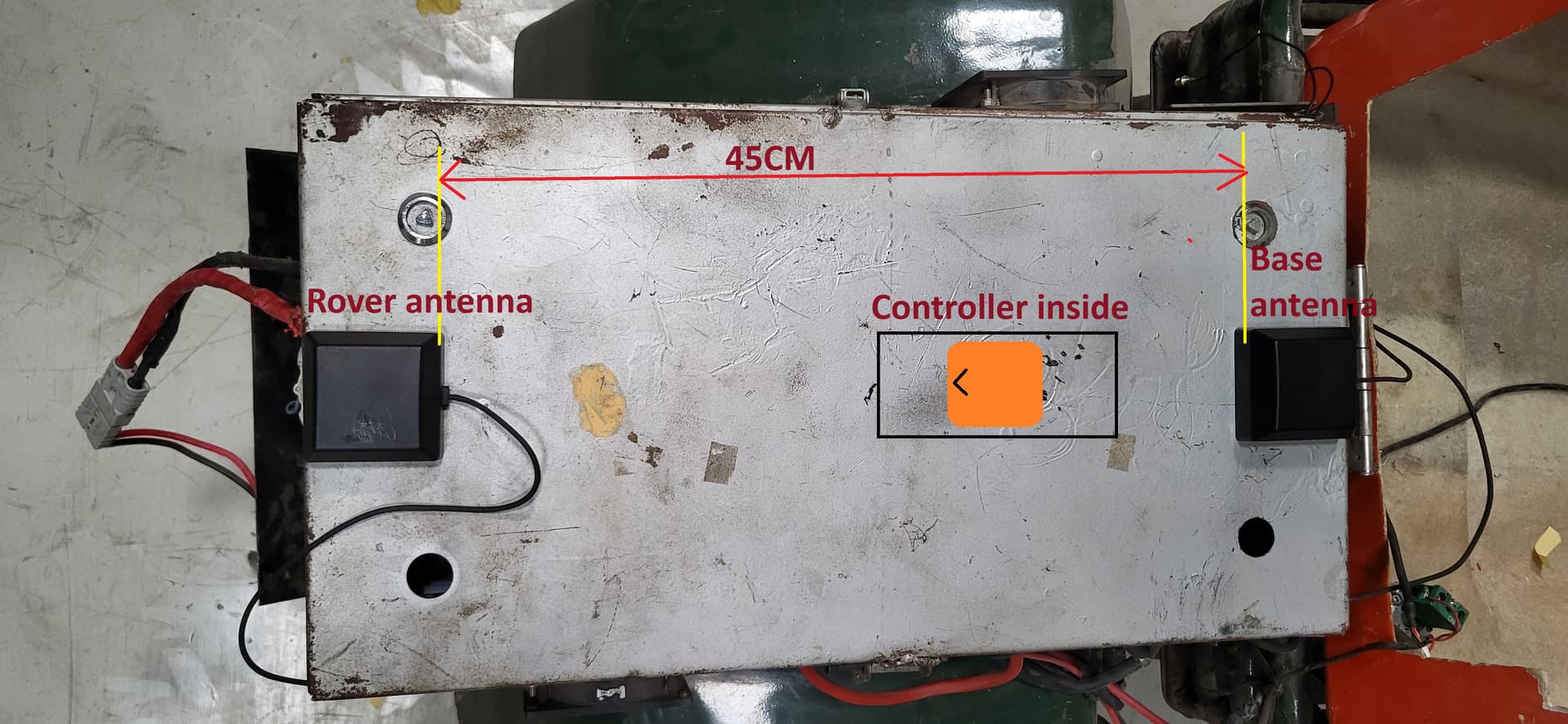
Sure, I will place the controller inside the rover and I will measure the difference between XYZ of both the GPS antennas and I will enter the proper values and I will take a trial.
I have no idea how you’re arriving at those offset values, but they appear to be wildly incorrect.
Set the following (the MB params aren’t used for uBlox serial GPS):
GPS_MB1_TYPE,0
GPS_MB1_OFS_X,0
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0.45
GPS_POS2_Y,0
GPS_POS2_Z,0
I’m assuming the Rover antenna is toward the front of the vehicle. You may want to measure again from center to center on the patch antennas and adjust that 0.45m value accordingly.
If GPS errors persist after correctly setting the autopilot parameters, connect each GPS module to u-Center one more time and use the little gear icon (the one with the red dot, right side of the image below) to reset each of them back to defaults. Then close u-Center and preferably never open it again.
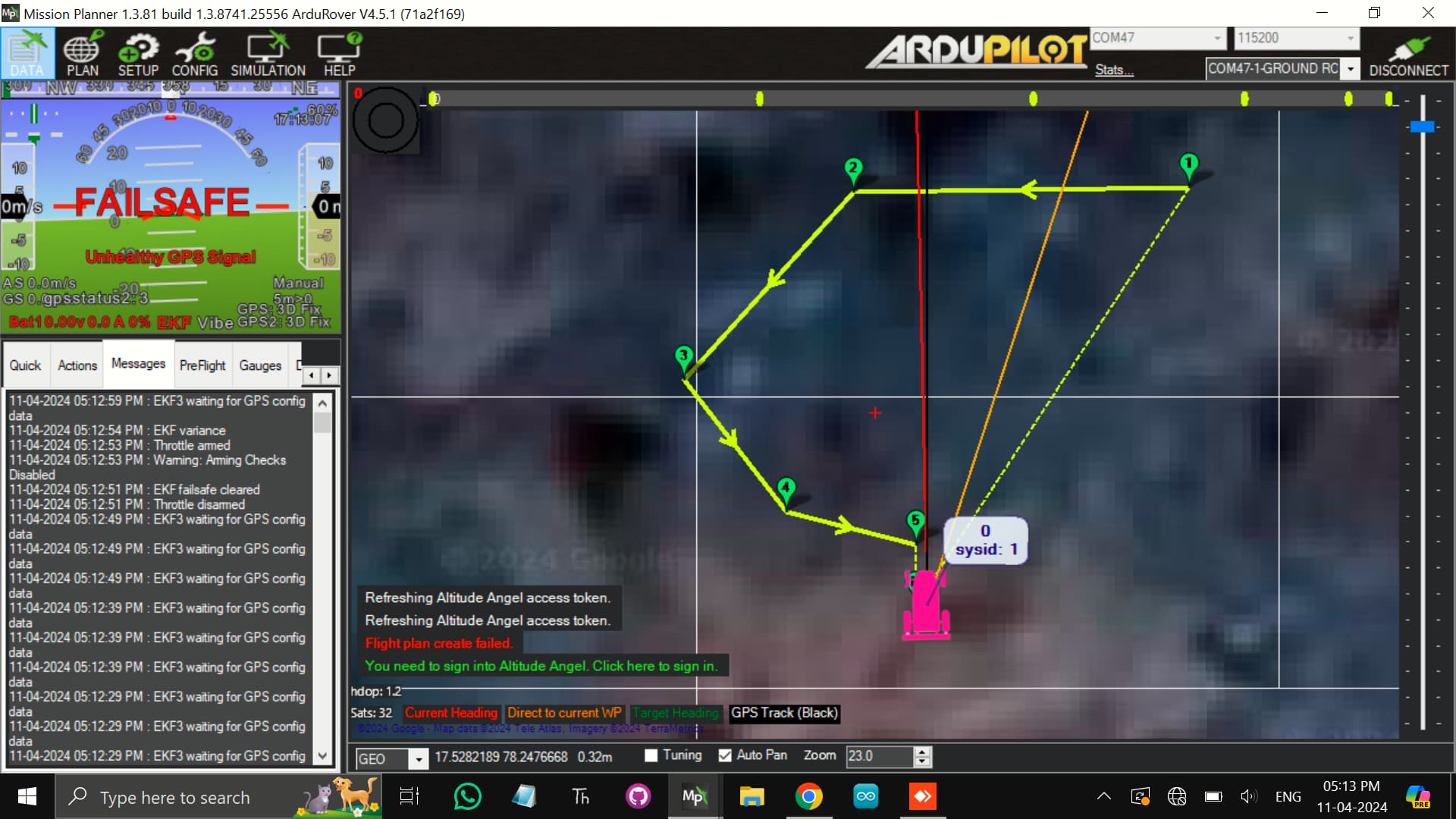
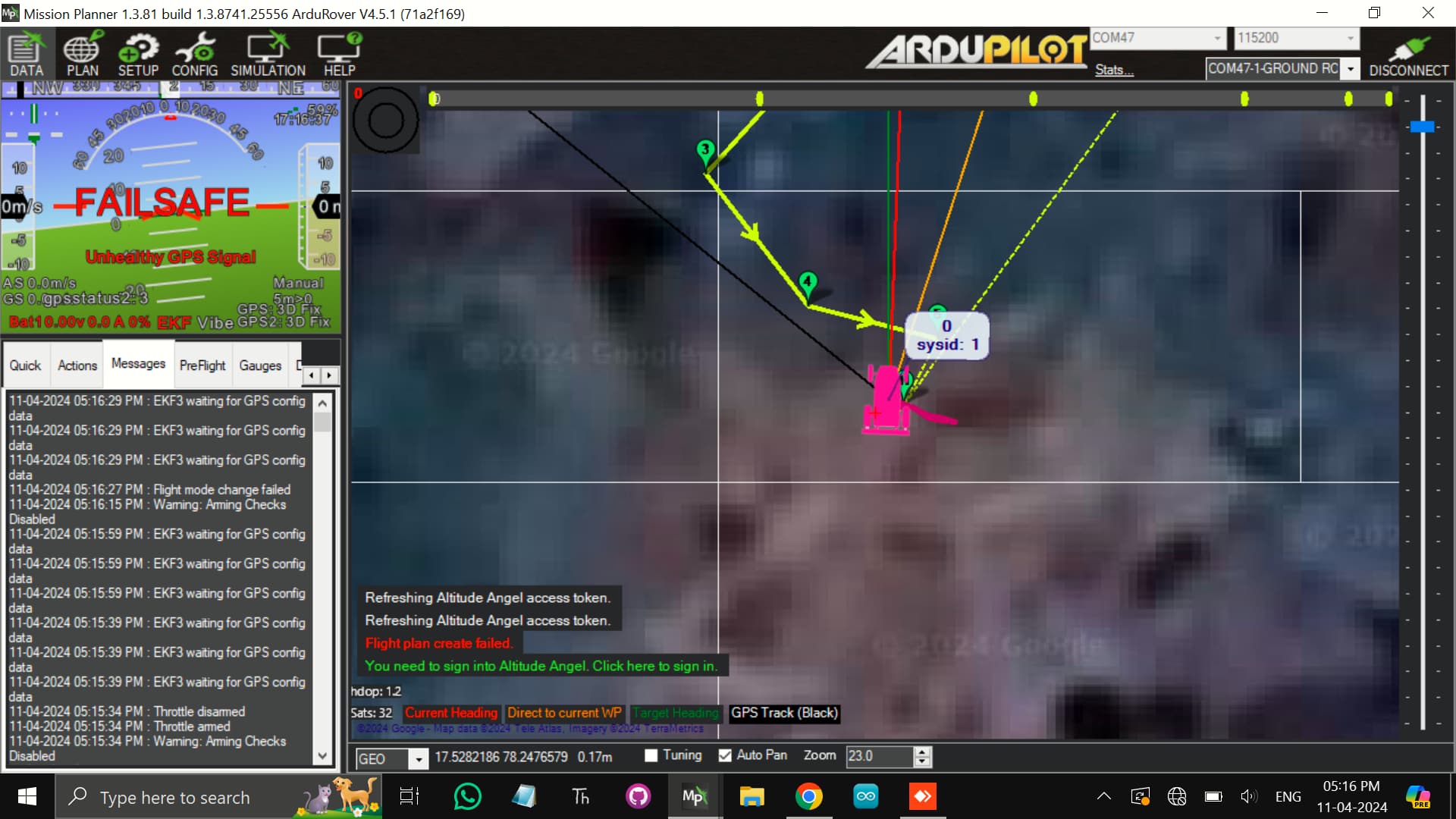
As you mentioned I changed the above parameters and reset the zed f9p’s to default configuration. Now GPS is not detected in the autopilot. I attached the param file and image for your reference.
Power cycle everything after making significant changes.
You reversed the order of GPS_TYPE and GPS_TYPE2 values. Making random changes will not help troubleshoot, though this isn’t the cause of the present issue. Recommend setting them back to 17 and 18, respectively.
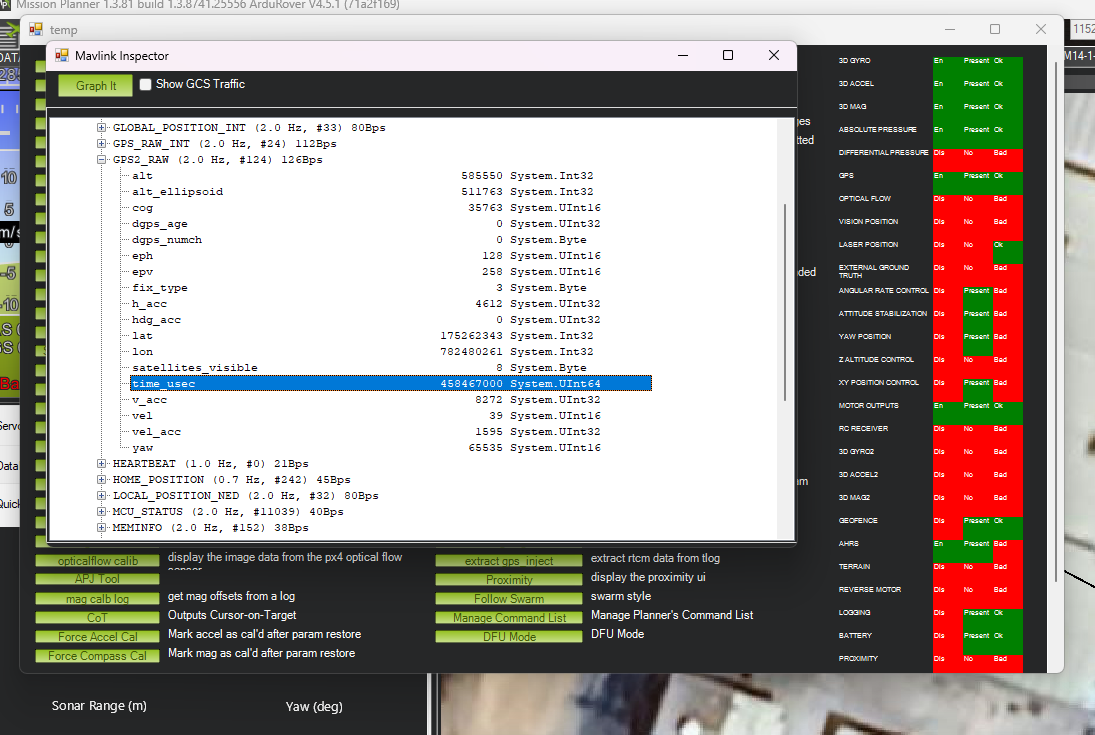
I tried many ways to get the yaw value from the zed f9p, but still, in the Mavlink inspector, I am getting the gps2_raw yaw value is 65534. I attached an image for your reference. And I am receiving continuous error messages like unhealthy AHRS or unhealthy GPS. Please help me to clear this issue.
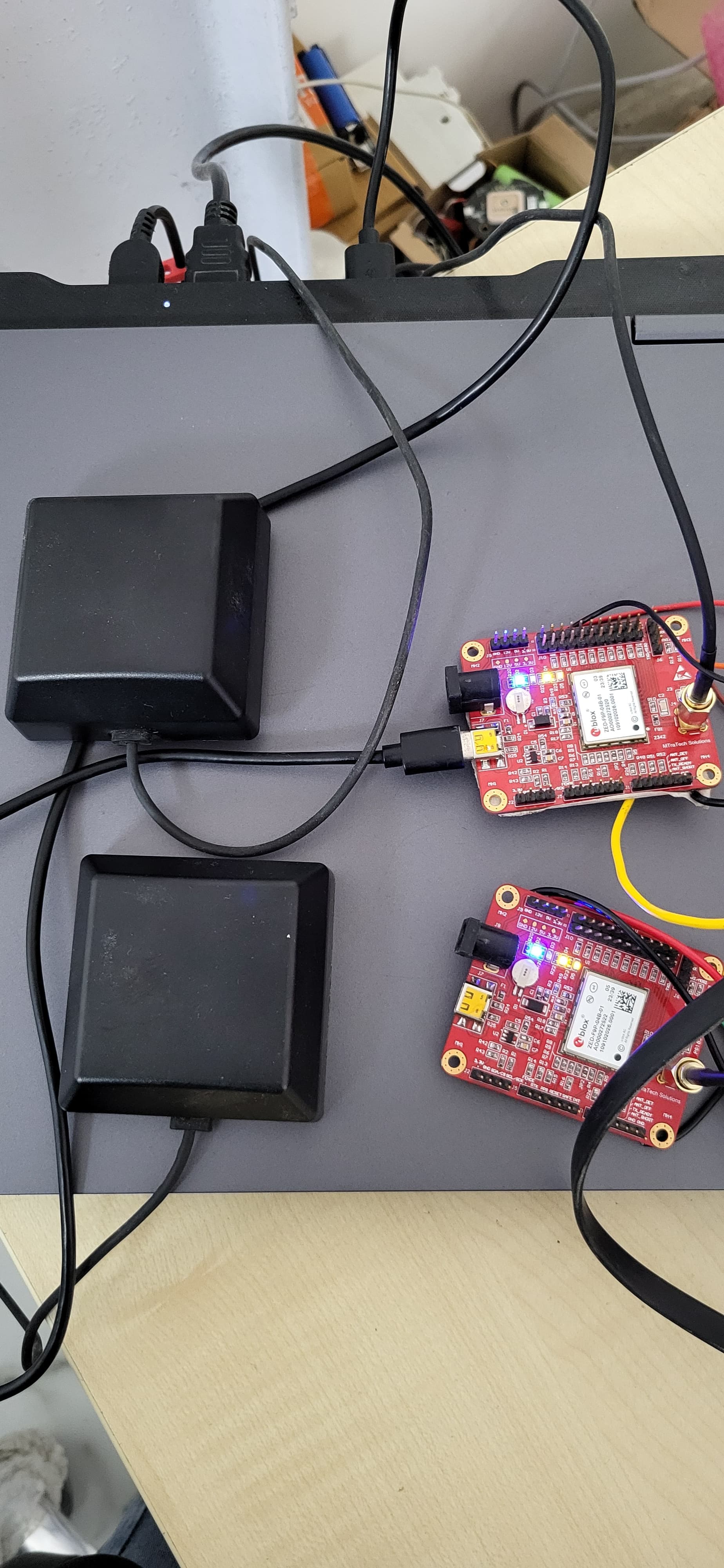
I am using the different zed f9p dev board, if I buy simplertk2b boards and configure them with the cube controller as per the below document, will it work? Please let me know. I attached images board images for your reference.
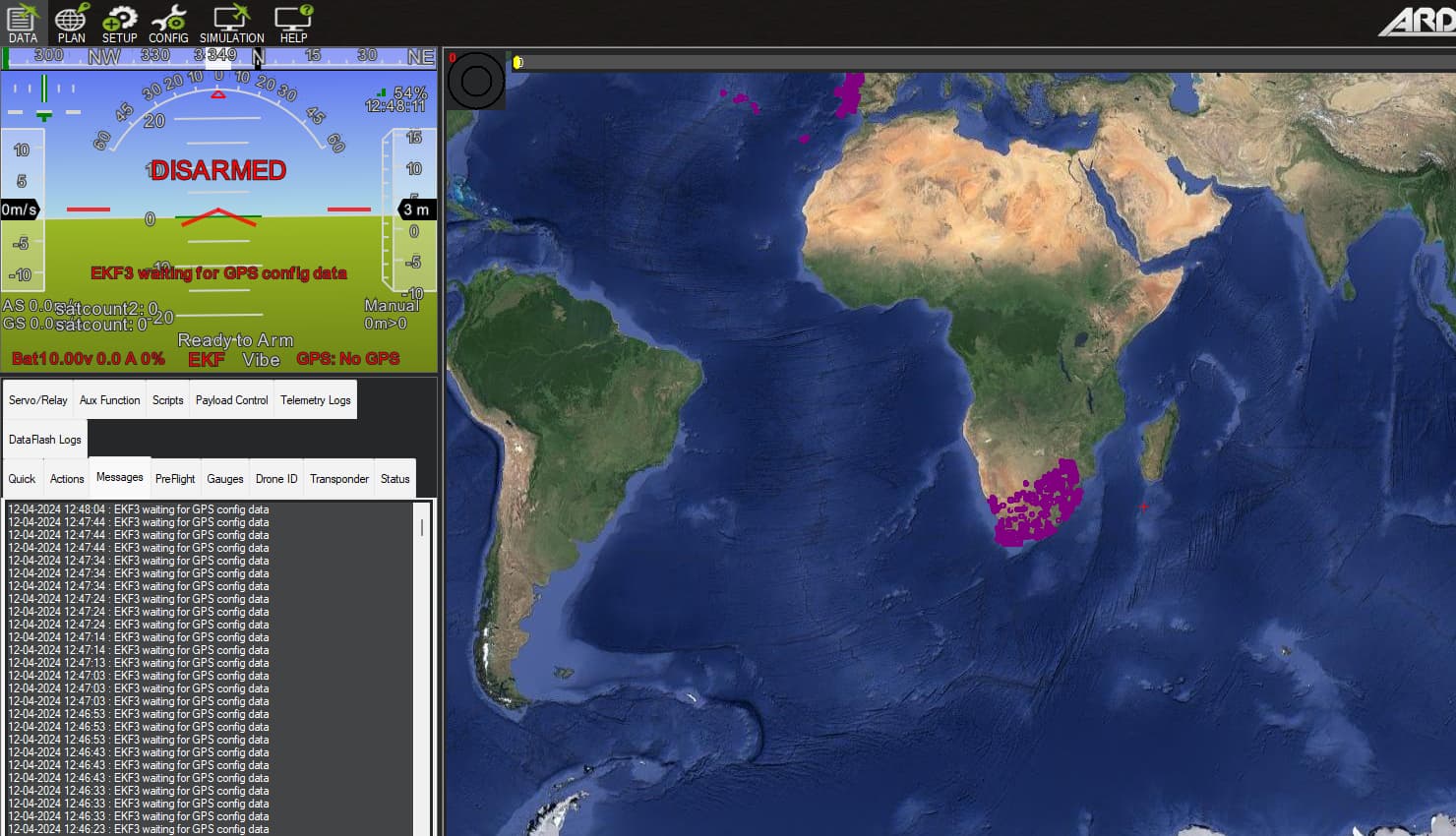
I purchased simplertk2b boards as per the suggestion. Now I am not able to receive any data from the rtk boards. In the mission planner, It shows no GPS. Please guide me on configuring the rtk boards and what parameters I need to change in the MP.