I tried to install all the versions like ardurover, copter etc, but none of them is working. But when I installed PX4, it was working. Then I tried with APMPlanner, then there it is functioning properly. After calibrating in the APMPlanner, if I connect with QGC, throttle and roll will again stop working. I’m not able to understand what the problem is. Any help?
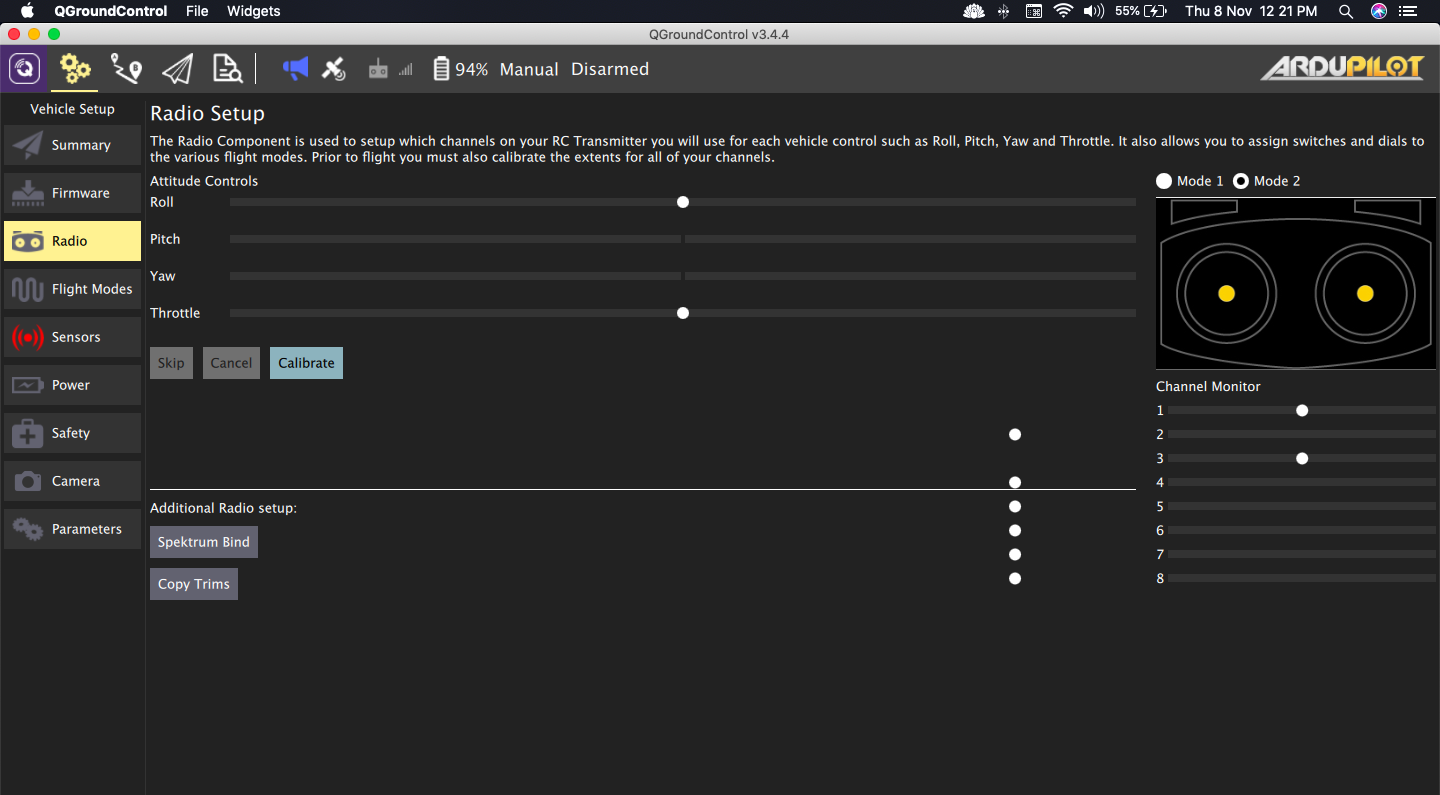
Why it’s coming like this in macOS Mojave? After updating, whenever I open the QGC, Throttle and roll are in static position. Not even moving a bit, and not able to calibrate. What should I do?