Hey Marc:
A little background. I have been flying Pitlabs OSD for a few years on multirotors and eventually bought the autopilots for attitude indications, internal temperature and vertical speed. Then this mavlink thing came up.
Think of the OSD as just another mavlink connected device such as the Tower app with telemetry radio. You get data from the air frame and can send commands up to it. I had a hard time understanding this myself. You use the OSD menu system, which you see in your goggles or monitor, navigate through the menu and toggle a radio switch to select commands to send up.
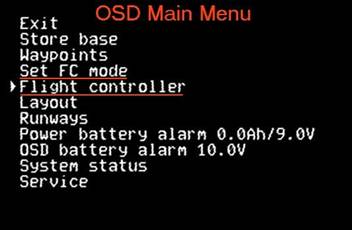
Here’s a screen shot of the present main OSD menu:
MM-FLT-M-FC-CONT.jpg
-Store base - resets flight timer, zeroes base altitude
-Waypoints - this is a list of any and all waypoints someone creates in Mission Planner. The OSD Waypoints list is populated when the frame is powered on and the mavlink connection is made to the FC. There are other features to the list presentation like the wpt relationship to base in N,S,E,W orientation and the wpt altitude, whether it is above, level or below present altitude. Also when navigating toward the wpt, the wpt number alternates with the altitude difference, telling you the wpt is above, level or below you.
-Set FC mode - a list of 10 flight modes to choose from
-Flight Controller
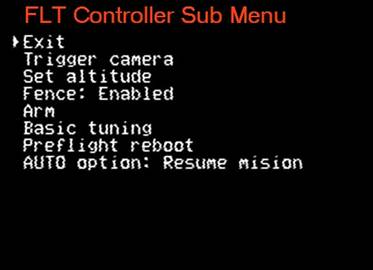
FC-SUB-MENU.jpg
-Trigger camera - if you have an DSLR mounted I suppose and a shutter release wired in
-Set Altitude - a list of altitudes for enroute
Fence: (enabled/disabled) a selection of Geofence parameters. You can turn the fence on/off, change the max altitude, circle radius, disable either of those. Same if you have designated a polygon type fence - on/off
-Arm - arms the FC
Basic tuning - 3 selections of RC response, Pitch & Roll and Climb. Each has a list of percentages, running from -25% up to +25%. Say select +5% for pitch and roll. These tweaks don’t replace what you’ve programmed in through a manual tune job or auto tune. They just add the selected layer on top. You wouldn’t want things to change, for instance, if the pitch axis had a slightly different value as the roll axis.
-Preflight reboot - will only be visible in the menu if the frame is disarmed (for obvious reasons)
-AUTO option - 2 choices - restart mission(from the beginning) or resume mission( navigating to the next wpt. If you past #3 before the mission interruption, it will fly to #4) With both of these options, you will have to invoke AUTO flight mode.
That’s it so far. If you have ideas, please feel free to suggest them on the RCGroups thread.
Regarding the ILS, yeah the Pitlabs AP will do them. You can still setup runways in the Pitlabs GUI and hand fly them. Or using Mission Planner, setup an approach like I’ve done. In Mission Planner setup a “mission” consisting of an outer wpt, call it the final approach fix in layman’s aviator terms. Give it a reasonable altitude of 300ft. Then at a distance of 50-75ft from touchdown point, create another wpt, call that DH - decision height and assign it an altitude of 30ft. So the air frame would follow this “glideslope” down. Wpt#3 is over the pad or just in front of it at 8-10ft. Wpt#4 is the land command where you want it to touchdown. Yeah, I know is easier to just tell it to RTL……
Then in Pitlabs OSD, setup the runway to mimic those parameters of wpt direction and use the slope angle between wpt #1 and #2 and set that as the glideslope in the OSD runway setup. Then you can have a visual representation of the approach if you have the ILS display feature visible in a OSD screen.
What’s going on here is not just an OSD. Arducopter pilots have had a few choices over the years. I’ve tried a couple when I was flying Pixhawk2. That was a few years ago. The only reason I came back to Pixhawk, now a 2.1, is Pitlabs OSD. What this will become is pilots can pretty much leave their phones and tablets home.
I’m hoping in the near future there will be a way to store multiple missions in the OSD. In the non-mavlink firmware, you can have multiple routes, which the Pitlabs AP would fly. Imagine being able to select a different mission in flight.
Anyway, you have questions, let me know.