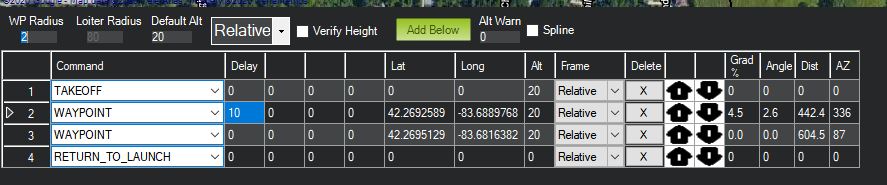
If you set a delay for a waypoint with SITL’s autopilot, it will continue to hover there and get stuck.
How can I get to the next waypoint with the set delay?
Is this a question? Yes - it will hover at that waypoint for however long the delay is.
The explanation was insufficient.
For example, even if you set a 1 second delay, it will continue to hover forever.
How can I get to the next waypoint with the set delay?
Can you send your waypoint file?
1 Like
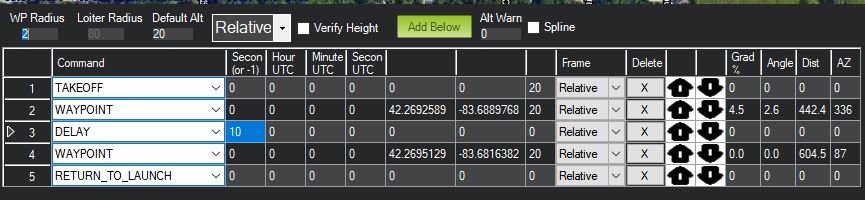
The UAV reaches the first waypoint.
If you set a delay there, you will not go to the next waypoint.
Probably you are setting the wrong value as delay seconds parameter. Please send your way points file as suggested above or more details about your work.