I have been looking at the ICE functionality for some time now but I have come to terms with the idea that there is just not enough support for its inclusion in Rover (see previous topic for Rover 4.3).
Recently, while going through the Rover 4.5.0 release post I was happy to notice the following entries:
ICE option to enable/disable starting while disarmed
ICE support for starter via relay
That said, I still cannot find the ICE_ENABLE (or any other ICE_ related) parameter in my Rover 4.5.2 on Pixhawk Cube Orange.
What am I missing here? Thanks in advance for any answers.
This is great news - and i missed it in the release notes. Any pointers or links to enabling this would be appreciated. We’ll definately include in on our build once understood and tested…
Sorry, ICE is not included in the Rover firmware yet. It’s appearance in the Rover release notes was just because we create the release notes for all vehicles and the same time and forgot to remove it for Rover. Sorry!
Is this tool still available? In the Github repository, it is mentioned that the tool’s website should allow to generate and download the custom firmware, but I can only see the build status table there. Are you using a local build? I may end up opening a separate topic for this.
Thanks @Oli1. Already visited this website but I still can’t see the tool. Only the previous custom firmware created by other users.
On a sidenote, the Github repository mentions that the tool was created to reduce the size of firmware. I dont know if it will be able to add functionality to Rover that is not supported in the first place.
Anyway I will give it a go building the Custom Firmware Builder locally and will post any results.
Our Rover has an ICE motor running the cutting blade and an alternator. Stalls are a problem.
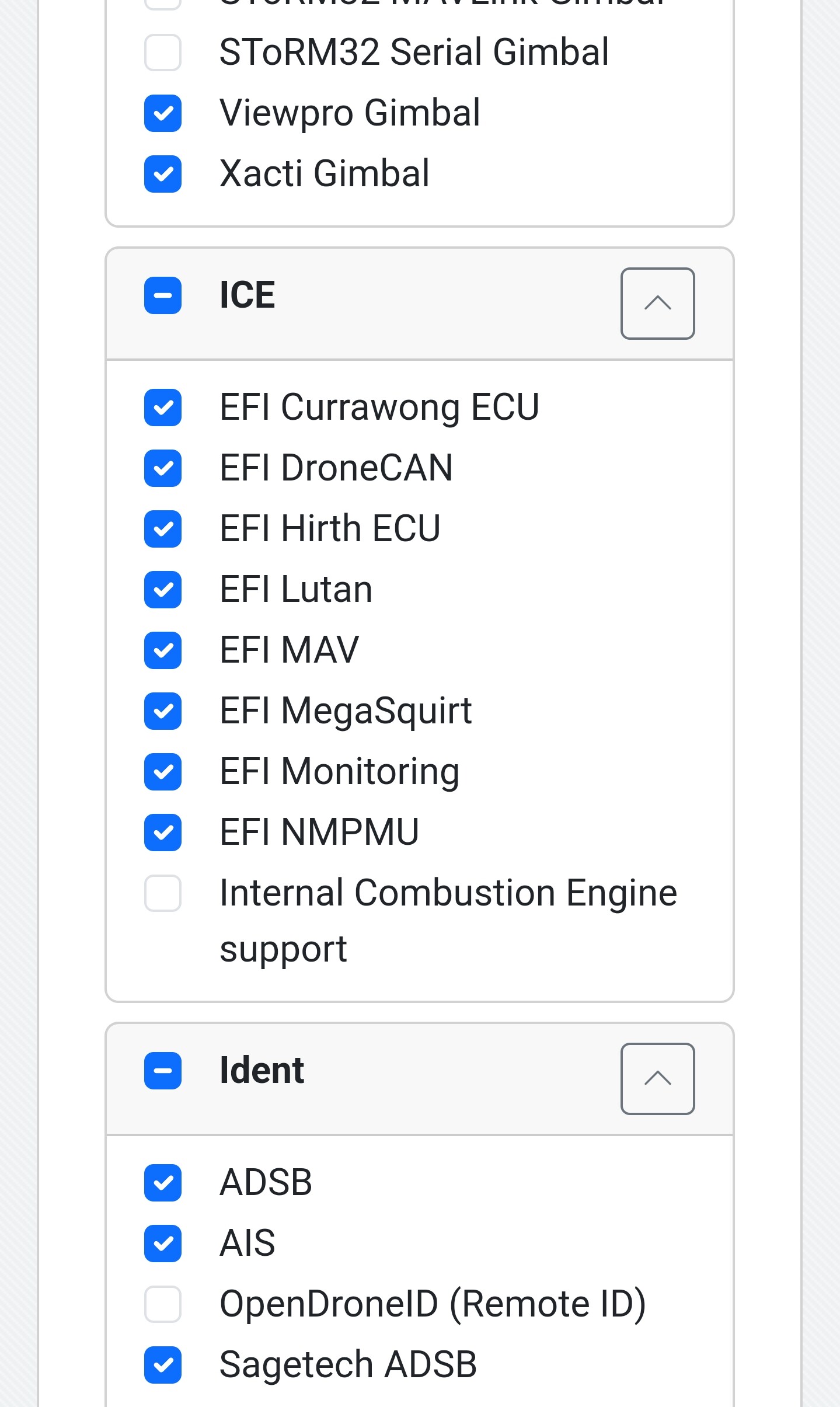
This functionality would be awesome. I did a custom rover build on 4.4.something. Added the ICE support. The custom build tool added it in, but during the build process, removed it back out.
Please reply back if you get the functionity working - but per Randy’s comments, looks like its on the list.